
© University of Bristol 2023 – V4.61
N.B.
The above operator ID is the only ID that is permitted for use and must be
displayed on every UAV operated by UOB.
UAS
Operations Manual
Version 4.61
25
th
October,
2023
Operator ID: GBR-OP-YF7VVQ4KM3J6
CAA Ref Number: 835

© University of Bristol 2023 Operations Manual V4.61
Page 2
PART 1.
1.1 Foreword
This document sets out the safety and operational procedures that must be adhered to by any user of an
unmanned aerial system (UAS) undertaking flight operations as part of study or research at the University of
Bristol or its subsidiary companies.
All operators and remote pilots at the University of Bristol must continue to review, and will comply, with any
new or amended regulation published by the CAA as described in this operations manual.
1.2 Accountable manager
The University of Bristol is committed to operating Unmanned Aircraft Systems (UAS) safely in UK airspace in
line with this operations manual and any CAA authorisations granted. The University of Bristol will ensure that
operating procedures and equipment are fit for purpose and used
appropriately. University of Bristol will
ensure that all personnel are appropriately trained
before being allowed to operate UAS.
Signed
Date
25
th
Nov 2023
Contact: Accountable manager
Name - Jason Parr, Head of Health and Safety

© University of Bristol 2023 Operations Manual V4.61
Page 3
Document Revision Record
Version
Date
Author
Change Description
V1.1
01/09/2009
Dr T. Richardson
Original UoB UAS Operations Manual
V1.2
01/10/2013
Dr T. Richardson
Revised in line with CAA guidance
V1.3
20/03/2015
Dr T. Richardson
Modifications related to personnel and operations
V1.4
28/03/2015
Dr T. Richardson
Minor modifications for CAA submission
V2.0
10/11/2016
Mr B. Schellenberg
Modifications & updates for BNUC/CAA submission
V2.1
13/12/2016
Mr B. Schellenberg
Revised in line with EuroUSC Guidance
V2.2
21/02/2018
Mr B. Schellenberg
Minor modifications, including addition of aircraft
V2.3
23/03/2018
Mr B. Schellenberg
Update of wording, including CAP 393 Articles and
references to aerial work and commercial operation.
V2.4
05/11/2018
Mr R. Clarke
Minor modifications: addition of aircraft, update
PfCO. Inclusion of CAP1687 changes.
V2.5
27/11/2018
Mr R. Clarke
Update insurance certificate. Add night operations
V2.6
6/12/2018
Mr R. Clarke
Additional pilot certificates
V2.7
5/2/2019
Mr R. Clarke
Addition of Titans. Addition of NAA for overseas
V2.8
1/3/2019
Mr R. Clarke
Update to reflect ANO changes as per CAP1763
V2.9
31/10/2019
Mr A. McConville
Updated personnel details and remove out of date
certificates.
V2.10
08/01/2019
Mr A. McConville
Additional 5 remote pilots added (sans COPSU
numbers). Updated reference documents list,
removed all mention of Pilot-in-Charge and
replaced with Remote Pilot.
V3.0
16/06/2020
Mr D. Hine
Change of nominated personnel (1.62)
V3.0
16/06/2020
Mr D. Hine
Addition of requirements for Operator number and
flyer ID (section 1.6.6)
V3.0
16/06/2020
Mr D. Hine
Added details of Fenswood Farm test facility
(section 5)
V3.0
16/06/2020
Mr D. Hine
Note added about forthcoming EU regulations
(Section 1.5)
V3.0
16/06/2020
Mr D. Hine
Remove reference to Wiki and replace with flight
lab SharePoint group.(section 1.6)
V3.0
16/06/2020
Mr D. Hine
Revised front page (to meet brand guidelines)
V3.1
16/06/2020
Mr D. Hine
Addition of pre departure risk assessment and
method statement form RAMS v1.0 (section 7.2.1)
V3.2
28/09/2020
Mr D. Hine
Accountable manager name and signature
changed.
V4.0
19/08/2021
Mr D. Hine
Remove reference to “commercial operations” –
Restructure for an operational authorisation
V4.0
19/08/2021
Mr D. Hine
Update roles and responsibilities
V4.0
19/08/2021
Mr D. Hine
Change of accountable manager
V4.0
19/08/2021
Mr D. Hine
Add in example Quick Ref Handbook
V4.1
13/09/2021
Mr D. Hine
UAS regulatory statement added Section 2.12
V4.1
13/09/2021
Mr D. Hine
Remove references to deleted articles (CAP393
articles 94 & 95)

© University of Bristol 2023 Operations Manual V4.61
Page 4
V4.1
13/09/2021
Mr D. Hine
Document version date and manager signature
date made to be the same
V4.1
13/09/2021
Mr D. Hine
Replace “UAS Operator” with “UAS operator”
V4.2
16/09/2021
Mr D. Hine
Operator number changed
V4.3
25/09/2021
Mr D. Hine
Operator number example label changed
V4.3
25/09/2021
Mr D. Hine
Comment added about Op-ID on cover page
V4.31
04/02/2022
Mr D.Hine
Broken hyperlinks to external resources updated.
V4.32
03/03/2022
Mr D.Hine
Addition of appendices –
Letter of Agreement Bristol Airport(NATS)
V4.4
12/09/2022
Mr D.Hine
Update internal training requirements Section 2.13
V4.4
12/09/2022
Mr D.Hine
Update list of pilots and qualification documents
V4.5
26/09/2022
Mr D.Hine
Section 2.4 update referenced document version
numbers
V4.5
26/09/2022
Mr D.Hine
Section 2.4 add link to CAA publications search tool
V4.5
26/09/2022
Mr D.Hine
Remove reference to PFCO in contents table
(replace with PDRA01)
V4.5
26/09/2022
Mr D.Hine
Replace all mentions of SUA, SUAS, SUAS with
“Unmanned aircraft” or “UAS”
V4.6
18/09/2023
Mr D.Hine
Update list of remote pilots
V4.6
18/09/2023
Mr D.Hine
Update insurance cover certificate
V4.6
18/09/2023
Mr D.Hine
UAS list updated to ONLY show aircraft used within
the specific category
V4.61
25/10/2023
Mr D.Hine
Amend publication dates -Referenced Documents
table (Section 2.4)
V4.61
25/10/2023
Mr D.Hine
Add specific procedure for abnormal environmental
conditions (High wind, Rain and low temperatures)
(Section 5.3.1)
V4.61
25/10/2023
Mr D.Hine
Declare adherence to the AMC Section 2.1.2
V4.61
25/10/2023
Mr D.Hine
Add requirement for remote pilots to fill In tech log
(Section 3.6)
V4.61
25/10/2023
Mr D.Hine
Amend maintenance and inspection section to
include requirements for tech log entries.
(Section 3.2)

© University of Bristol 2023 Operations Manual V4.61
Page 5
CONTENTS
PART 1................................................................................................................. 2
1.1 Foreword .................................................................................................................................................... 2
1.2 Accountable manager ................................................................................................................................ 2
PART 2. GENERAL .......................................................................................... 8
2.1 Introduction ................................................................................................................................................ 8
2.1.1 Operations .......................................................................................................................................... 8
2.1.2 Safety .................................................................................................................................................. 8
2.1.3 Training ............................................................................................................................................... 8
2.2 Definitions ................................................................................................................................................ 10
2.3 Document control and amendment process ............................................................................................ 11
2.4 Referenced Documents ........................................................................................................................... 11
2.5 Structure of the organization and nominated personnel .......................................................................... 11
2.5.1 Nominated personnel ........................................................................................................................ 11
2.5.2 Remote Pilots (RP) ........................................................................................................................... 12
2.5.3 Insurance cover ................................................................................................................................ 13
2.5.4 Responsibilities and duties of the Operator ...................................................................................... 14
2.5.5 Responsibilities and duties of the Remote Pilot ............................................................................... 14
2.5.6 Responsibilities and duties of support personnel ............................................................................. 14
2.5.7 Legal obligations for each Remote Pilot ........................................................................................... 15
PART 3. AIRCRAFT AND OPERATONAL CONTROL .................................. 16
3.1 UAS technical descriptions and roles ...................................................................................................... 16
3.1.1 Area and types of operation .............................................................................................................. 17
3.1.2 Operating limitations and conditions ................................................................................................. 17
3.1.3 Night flying operations ...................................................................................................................... 17
3.2 Maintenance ............................................................................................................................................. 18
3.2.1 Software and firmware update policy ............................................................................................... 18
3.3 Supervision of UAS operations ................................................................................................................ 18
3.4 Accident prevention and Flight Safety programme .................................................................................. 18
3.4.1 Mandatory Occurrence Reporting..................................................................................................... 18
3.5 Flight team composition ........................................................................................................................... 19
3.5.1 Operation of multiple types of UAS................................................................................................... 19
3.5.2 Qualification requirements ................................................................................................................ 19
3.5.3 Crew health ....................................................................................................................................... 19
3.6 Logs and records ..................................................................................................................................... 20

© University of Bristol 2023 Operations Manual V4.61
Page 6
PART 4. FLIGHT PLANNING AND PREPARATION ..................................... 21
4.1.1 Determination of intended tasks and feasibility ................................................................................ 21
4.1.2 Operating site location and assessment ........................................................................................... 21
4.1.3 Risk management ............................................................................................................................. 21
4.1.4 Communications ............................................................................................................................... 21
4.1.5 Pre-notification .................................................................................................................................. 22
4.1.6 Site permissions................................................................................................................................ 22
4.1.7 Weather ............................................................................................................................................ 22
4.1.8 Preparation and serviceability of equipment and UAS ..................................................................... 23
PART 5. OPERATING PROCEDURES .......................................................... 24
5.1 Pre-flight procedures ................................................................................................................................ 24
5.1.1 Site Survey ........................................................................................................................................ 24
5.1.2 Selection of operating areas and Alternates ..................................................................................... 24
5.1.3 Crew briefing ..................................................................................................................................... 25
5.1.4 Cordon procedure ............................................................................................................................. 25
5.1.5 Communications ............................................................................................................................... 25
5.1.6 Weather checks ................................................................................................................................ 25
5.1.7 Charging and fitting batteries (Refuelling) ........................................................................................ 25
5.1.8 Loading of equipment ....................................................................................................................... 26
5.1.9 Preparation and correct assembly of the UAS ................................................................................. 26
5.1.10 Pre-flight checks on UAS and equipment ......................................................................................... 26
5.2 Flight procedures ..................................................................................................................................... 27
5.2.1 Start .................................................................................................................................................. 27
5.2.2 Take-off ............................................................................................................................................. 27
5.2.3 In-flight .............................................................................................................................................. 28
5.2.4 Landing ............................................................................................................................................. 29
5.2.5 Shutdown .......................................................................................................................................... 29
5.3 Emergency procedures ............................................................................................................................ 29
5.3.1 Appropriate to the UAS and control system ..................................................................................... 29
5.3.2 Fire .................................................................................................................................................... 31
5.3.3 Accidents .......................................................................................................................................... 32
5.3.4 Pilot incapacitation ............................................................................................................................ 32
PART 6. FENSWOOD FARM FIELD ROBOTICS CENTRE .......................... 33
6.1.1 Introduction: ...................................................................................................................................... 33
6.1.2 Proximity to Bristol International Airport ........................................................................................... 33
6.1.3 How to use Fenswood Farm – New user ......................................................................................... 34
6.1.4 Upon arrival ....................................................................................................................................... 34
6.1.5 Fenswood Farm Contact Details ...................................................................................................... 35
PART 7. SUPPORTING DOCUMENTS .......................................................... 35
7.1 Current PDRA (29
th
sept 2020 - 2021) ..................................................................................................... 36
PART 8. PRE DEPLOYMENT RAMS GUIDANCE ......................................... 44
8.1.1 UAS Pre-deployment Risk Assessment and Method Statement (RAMS) ........................................ 44
8.2 Checklists and useful documents ............................................................................................................ 52
8.2.1 Quick Reference Handbook DJI Mavic 2 Pro ................................................................................... 53
8.2.2 Example Arrival Checklist ................................................................................................................. 75
8.2.3 Example Post-Arrival Site Survey ..................................................................................................... 76

© University of Bristol 2023 Operations Manual V4.61
Page 7
8.2.4 Example Pre-Flight Checklist ............................................................................................................ 77
8.2.5 Example Logbook Entry .................................................................................................................... 78
8.2.6 Example Incident Report Form ......................................................................................................... 79
8.3 Other Forms ............................................................................................................................................. 80
8.3.1 Example Embarkation Checklist ....................................................................................................... 80
8.3.2 Example Post-Flight Checklist .......................................................................................................... 81
8.3.3 Example Maintenance Log ............................................................................................................... 82
8.4 Qualifications & Certificates ..................................................................................................................... 83
8.5 University Aircraft Details ......................................................................................................................... 85
8.6 Appendices .............................................................................................................................................. 87
8.6.1 Letter of agreement – Bristol University & Bristol Airport (NATS) .................................................... 87

© University of Bristol 2023 Operations Manual V4.61
Page 8
PART 2. GENERAL
2.1 Introduction
This document covers both the Safety and Operational procedures that are required to conduct operations under
a CAA issued Operational Authorisation (OA). The contents include the University of Bristol UAS structure,
personnel, aircraft systems, procedures and operations.
The information provided within this document is intended to complement that which is provided by the CAA and
it is the responsibility of the UAS operator to ensure that they familiar with and comply with the latest information,
guidance and requirements of the CAA. Please refer to:
https://www.caa.co.uk/consumers/remotely-piloted-aircraft/
The overriding responsibility of the UAS operator and remote pilot is to ensure that all UAS operations are
conducted safely and legally at all times.
2.1.1 Operations
This manual applies to all UAS operated by the University of Bristol. It is to be used for all operations conducted
in any country but has been specifically written to meet the UK CAA requirements. For operations in additional
territories, it is the responsibility of the UAS operator and remote pilot to ensure that all additional local legal
requirements are satisfied.
2.1.2 Safety
The primary objective of UAS operation for the University of Bristol is that of safety, and a safety conscious
environment is encouraged for all. Adherence to this manual is no guarantee of safe operation, and all UAS
operators must ensure that all personnel are competent and provided with adequate training, briefing and
debriefing. In addition, UAS operators and remote pilots must ensure that:
• All flights are logged in accordance with this operations manual
• Regular maintenance and inspection is carried out for all University of Bristol UAS
• All personnel are familiar with and trained on the UAS to be flown
• All personnel are fully briefed on the mission objectives, flight requirements, and safety cases, prior to
operation
• Any incidents are investigated, reported, and appropriate lessons learned noted.
All Operations will be carried out in accordance with the issued Operational
Authorisation PDRA01 and abide by the requirements of ANO2016 as amended and
UAS Implementing Regulation 2019/947 (as retained in UK Law) AND its Acceptable
Means of Compliance AMC.
2.1.3 Training
All University of Bristol remote pilots and associated personnel MUST undergo training appropriate to the
operations they are intending to undertake. Any remote pilot intending to operate any UAS with MTOW >250g
should undertake a full GVC theory course and practical assessment. The University of Bristol will keep a record
of who has received training, and the type and extent of the training that they have received. To request a place
on a GVC course please contact the Drone Safety Group.

© University of Bristol 2023 Operations Manual V4.61
Page 9
© University of Bristol 2023 Operations Manual V4.61
Page 10
2.2 Definitions
Accountable Manager (AM)
Has the authority for ensuring that all activities are carried out in accordance with
the applicable requirements and is responsible for establishing and maintaining
an effective Management System
AGL
Above Ground Level
AMSL
Above Mean Sea Level
ANO
Air Navigation Order
ANO
Air Navigation Order
ATC
Air Traffic Control
ATZ
Air Traffic Zone
Authorised Representative
(AR)
The first point of contact with the CAA
BVLOS
Beyond Visual Line of Sight
CAA
Civil Aviation Authority
CAP
Civil Aviation Publication
Congested Area
Any area which is substantially used for residential, industrial, commercial or
recreation activities.
DA
Danger Area
ECCAIRS
European Co-ordination Centre for Accident and Incident Reporting Systems
ERF
Emergency Restriction of Flying
EVLOS
Extended Visual Line Of Sight
EVLOS
Extended Visual Line of Sight
FOP
Flight Operations Policy
GCS
Ground Control Station
MOR
Mandatory Occurrence Reporting
MTOW
Maximum Take-off Weight
NAA
National Aviation Authority
NOTAM
Notice to Airmen
OA
Operational Authorisation
Observer/Crew (OC)
An individual, deemed competent by the Remote Pilot, whose main role is to assist
the RP to maintain VLOS on the UAS
Operations Manager (OM)
Responsible for the day-to-day planning of flight operations
Remote Pilot (RP)
An individual who is responsible for the safe operation of the UAS
RPA
Remotely Piloted Aircraft
RPAS
Remotely Piloted Aircraft System
UAS Operator
The legal entity that is responsible for the management of the UAS.
Technical Manager (TM)
Has responsibility for maintaining the UAS in an airworthy state
UA
Unmanned Aircraft
UAS
Unmanned Aircraft System
VFR
Visual Flight Rules
VLOS
Visual Line of Sight
VMC
Visual Meteorological Conditions

© University of Bristol 2023 Operations Manual V4.61
Page 11
2.3 Document control and amendment process
All operators and remote pilots at the University of Bristol must continue to review, and will comply with, any
new or amended regulation published by the CAA.
A nominated person within the university shall hold the master electronic copy of this document. Any changes
in procedure or legislation will be reflected in new issues of this operations manual and will be distributed to all
operators and remote pilots once approved by the accountable manager. A copy of the amended document will
be sent to the CAA as required.
It is the responsibility of every University of Bristol UAS remote pilot to ensure that they have an up-to-date
version of this manual prior to any flight operations.
The latest version can be found here: https://uob.sharepoint.com/teams/grp-dronesafety/
2.4 Referenced Documents
The following documents may be referenced and should be referred to for full statutory text.
Reference
Full Title
Issue Number & Date of Issue
CAP 382
Mandatory Occurrence Reporting Scheme
July 2021 link
CAP 1789A
The UAS Implementing Regulation
V7.0 2 Dec 2022 link
CAP 1789B
The UAS Delegated Regulation
V3.0 2 Dec 2022 link
CAP 2013
ANO 2020 amendment guidance for UAS
V1.0 17 Dec 2020 link
CAP 403
Flying Displays and Special Events
V20 – 16 March 2023 link
CAP 722
Unmanned Aircraft Systems Operations in UK
Airspace – Guidance
V9.1 22 Dec 2022 link
EU2015/2018
EU MOR Guidance
29 June 2016 link
To find additional documents please use the CAA Publications search tool here
2.5 Structure of the organization and nominated personnel
The University of Bristol is a large organisation, and it is expected that there will be numerous user groups within
it who would like to regularly fly UAS for research or teaching purposes.
Current nominated personnel have been listed in the section below. The University of Bristol will keep an
updated record of all personnel involved with UAS work.
A Bristol UAS ‘drone safety’ advisory group has been established. This is a group of people, with technical,
operational and safety backgrounds, who will meet on a regular basis to monitor Bristol UAS operation to ensure
safety and compliance with all statutory requirements.
Operational information and flight logging is available via the drone safety SharePoint page (accessible to
internal staff/students only)
2.5.1 Nominated personnel
Name
Roles (see 2.2 for definitions)
OM, TM, RP, PO, OC
Jason Parr
Accountable Manager
Fred Hale
Safety Advisor
Duncan Hine
Operations Manager, Authorised Representative, Chief Pilot

© University of Bristol 2023 Operations Manual V4.61
Page 12
2.5.2 Remote Pilots (RP)
Remote Pilot (RP)
GVC Category
Flyer ID
Duncan Hine
Multirotor / FixedWing
GBR-RP-4BPDTDL9PHYR
Thomas David
Multirotor / FixedWing
GBR-RP-R6P4MVG7PR8R
Hirad Goudarzi
Multirotor
GBR-RP-K6F4NRX94MS9
Mickey Li
Multirotor
GBR-RP-RQGNFM6SV6CJ
Ewan Woodbridge
Multirotor
GBR-RP-HBFJH27FHM47
Yannick Verbelen
Multirotor
GBR-RP-D7VLS9P864VF

© University of Bristol 2023 Operations Manual V4.61
Page 13
2.5.3 Insurance cover
The operation of UAS by the University of Bristol is covered by the University insurance policy, the relevant part
of which is attached to this Operations Manual. It is the responsibility of the UAS operator to ensure that all
activities undertaken fall within the remit of this policy. Additional information can be obtained by contacting the
University of Bristol Insurance Officer.
This insurance covers employees and students whilst engaged in connection with authorized University
activities only. This also applies to any person volunteering to assist, or co-opted to assist, the University in its
business.

© University of Bristol 2023 Operations Manual V4.61
Page 14
2.5.4 Responsibilities and duties of the Operator
The overriding responsibility of the operator is to ensure that all flights are conducted legally and safely. To
ensure that this is the case, the UAS Operator must be familiar with the operational requirements of the vehicle(s)
they are responsible for and must be operating in accordance with CAA or relevant NAA regulations. The
operator may manage one or multiple remote pilots and shall delegate some responsibilities to them. Note that
the UAS Operator might also be the Remote Pilot, and that primary responsibility for the aircraft will always lie
with the Remote Pilot.
Please Note: No matter who is directing UAS operations, the final decision to fly and final
responsibility for the safety of the airframe and the environment remains with the Remote Pilot.
2.5.5 Responsibilities and duties of the Remote Pilot
The UAS Remote Pilot has ultimate responsibility for checking that:
• the flight can safely be made, taking into account the latest information available regarding the route,
the weather reports and forecasts available and any alternative course of action which can be adopted
in case the flight cannot be completed as planned.
• all relevant NOTAMS have been checked and abided by.
• all relevant land owner permissions have been sought and established.
• all equipment to be carried in the circumstances of the intended flight is in a fit condition for use and has
been fully maintained.
• the aircraft and ground control equipment is in every way fit for the intended flight, and that where
certification is required to be in force, it is in force and will not cease to be in force during the intended
flight operations.
• the payload carried by the aircraft is of such weight, and is so distributed and secured, that it may safely
be carried on the intended flight.
• a sufficient and suitable power source is carried for the intended flight, and that a safe margin has been
allowed for contingencies.
• an UAS specific pre-flight check system has been established by the operator, briefed, and complied
with by all ground personnel.
• before take-off, all reasonable steps have been taken so as to be satisfied that it is capable of safely
taking off, reaching and maintaining a safe height and making a safe landing at the place of intended
destination without any obstructions on the intended route.
• all required local authority permissions have been sought and established.
• where required, local authority and police liaisons have been established.
• all associated personnel have had the appropriate training.
2.5.6 Responsibilities and duties of support personnel
The following is a list of possible support personnel. It is the responsibility of the UAS Operator to make sure
there are sufficient personnel present to operate safely:
• The Remote Pilot is responsible for the safe completion of each flight and is legally responsible for
the safe operation of their aircraft. They may pilot the aircraft during takeoff, landing, or during
emergency procedures, and are responsible for primary pre-flight checks of the airframe.
• An Observer assists the Remote Pilot and is responsible for crowd control and perimeter safety.
• The GCS Operator and/or Payload Operator is trained to operate the GCS and monitor the flight.
Additional responsibilities will include data gathering and payload operation, however these are
secondary to the safe operation of the aircraft. These roles may be performed by a single person or by
multiple people depending on the mission requirements.

© University of Bristol 2023 Operations Manual V4.61
Page 15
2.5.7 Legal obligations for each Remote Pilot
Flyer ID
It is a legal requirement for each remote pilot to obtain a CAA flyer ID number via the dronesafe website. This
should be in date before any flights take place.
https://register-drones.caa.co.uk/individual
Your flyer ID number should be given to the flight operation manager before any flight commences for logging
in the electronic logbook system.
Flight Logs
It is a legal requirement to log all flights. The university provides a logging system for this purpose.
Flight logging system: https://uob.sharepoint.com/teams/grp-dronesafety/
UOB Operator Number
It is a legal requirement for each UAS to have the UOB operator ID number affixed to the outside before
commencing flight operations. The university has a single operator number. No other operator number shall be
used in relation to work or teaching undertaken by staff or students.
Example UOB operator number sticker. Displaying the UOB operator number along with the individually
assigned aircraft ID number.

© University of Bristol 2023 Operations Manual V4.61
Page 16
PART 3. AIRCRAFT AND OPERATONAL CONTROL
3.1 UAS technical descriptions and roles
The following is a summarized list of University of Bristol UAS and their primary roles. Technical details of these
vehicles can be found in the Appendix.
N.B. Historically all UOB UAVs were listed here.
From Sept 2023 this list contains only those UAVs that will be used within the specific category.
If you wish to add a UAV to the specific category list please contact the drone safety group.
grp-dronesafety@groups.bristol.ac.uk
Aircraft name
UOB -ID number
Type
Wingtra1 HR
UOB-80
Fixed Wing VTOL
Wingtra1 FL
UOB-81
Fixed Wing VTOL
M600 HR
UOB-32
Multirotor
M600 IAC
UOB-11
Multirotor
M300
UOB-42
Multirotor
Minion1
UOB-34
Multirotor
Minion 2
UOB-35
Multirotor
Minion 3
UOB-36
Multirotor
Minion 4
UOB-37
Multirotor
Minion 5
UOB-38
Multirotor
BUDDI
UOB-96
Fixed Wing
Goliath
UOB-14
Multirotor

© University of Bristol 2023 Operations Manual V4.61
Page 17
3.1.1 Area and types of operation
Types of operation will include some or all of the following:
• Aerial archaeology
• Aerial inspection
• Aerial mapping & surveying
• Aerial photography & cinematography
• Platform research & development
• Remote sensing
• Scientific missions
• Search & rescue
• Surveillance
Operating areas will include open countryside, roads, building sites, and limited-built-up areas where safe and
legal operation is possible. All necessary permissions must be sought before operations and must be carried
out in line with CAA or relevant NAA regulations.
3.1.2 Operating limitations and conditions
Current overall limitations on all UAS operations at the University of Bristol are given in the following table.
Further limitations will apply depending on the platform being flown. It is the responsibility of the UAS Operator
to ensure that both regulation and platform limitations are adhered to for all UAS operations. Please see
appendices for specific platform limitations.
Item
Limitations
Operational Envelope
• VLOS: 400ft AGL, 500m from RPA Pilot
Operational endurance
Platform specific reductions apply
Maximum airspeed at mean sea
level
70 kts – platform specific reductions apply
Maximum environmental operating
temperature
+45 degrees Celsius
Minimum environmental operating
temperature
-20 degrees Celsius
Maximum operational wind speed
Platform specific reductions apply
Maximum operational ceiling
5000ft AMSL, operating VLOS in special cases from the
top of mountains. Possible extension with special
permission. Platform specific performance limitations.
3.1.3 Night flying operations
Prior to any night time operations (where night time is defined as the time from half an hour after sunset until
half an hour before sunrise, sunset and sunrise being determined at surface level), a daylight reconnaissance
and site safety assessment including aircraft flightpaths within the surrounding area, shall be undertaken to
identify, address and record any hazards, restrictions and obstacles. The launch site shall be provided with
adequate illumination and the aircraft shall be equipped with adequate lighting. Flights shall only commence
when the weather conditions and visibility of the UAS are suitable for continuous VLOS operations.

© University of Bristol 2023 Operations Manual V4.61
Page 18
3.2 Maintenance and repairs
All University of Bristol aircraft must be maintained to the highest standards and must be fully inspected prior to
flight by the Remote Pilot.
Before each deployment, as the UAV is taken from storage it should be inspected by a suitably qualified remote
pilot, familiar with the AUV, and an entry logged in the tech log stating that the UAV is complete and ready to
fly.
Any modifications, repairs or damage should be noted in the tech log for that UAV.
Any repairs or modifications that are beyond the design intent for the specific UAV should be referred to the
drone safety group for support and guidance before being undertaken.
3.2.1 Software and firmware update policy
University of Bristol UAS operators must ensure that they update all software and firmware whenever any new,
robust, and verified versions become available. The Remote Pilot will take responsibility for testing all updates
in a controlled environment before any flights commence. Any software updates should be logged in the relevant
UAV tech log.
3.3 Supervision of UAS operations
Primary responsibility for each UAS operation lies with the remote pilot and it is their responsibility to plan and
carry out safely all UAS operations. For any significant intended changes in types of operations or area of
operation, the remote pilot must discuss their intentions with the operations manager/drone safety group in the
first instance.
3.4 Accident prevention and Flight Safety programme
Safety is the primary objective of and UAS activity conducted by the University of Bristol. It is the responsibility
of all personnel to ensure that they contribute to a culture of safety and participate fully in identification and
notification of hazards and risks. No unnecessary risks must be taken and all personnel must be in full agreement
that a safe flight can take place before operations commence.
If any incident takes place, however small, the UAS remote pilot is responsible for establishing the circumstances
of the incident and reporting it to the drone safety group, operations manager and to the CAA and other relevant
authorities where appropriate. Information included must include the date, time, description of the incident,
weather, and any other relevant information.
Examples of minor incidents may include:
• a near miss with a fixed object, building or tree that does not endanger other air users or
ground based third parties.
• where a safety area of a flying site has an incursion by unauthorized persons or animals that may
endanger the safety of the site.
• a small equipment or machinery failure on the RPAS that does not immediately affect the
performance of the aircraft and allows for a safe landing.
The intent is to learn from incidents such that they cannot occur again. No punishment or blame will be attributed
to those reporting incidents.
3.4.1 Mandatory Occurrence Reporting
Mandatory Occurrence Reporting (MOR) shall apply when the following incidents occur:

© University of Bristol 2023 Operations Manual V4.61
Page 19
• Loss of control/datalink – where that loss resulted in an event that was potentially prejudicial to the
safety of other airspace users or third parties (including flyaways)
• Automatic Navigation failures (waypoints)
• Display failures (Ground station issues) and Crew Resource Management (communication)
failures/confusion
• Structural damage/heavy landings
• Significant flight programming errors
• Major injury, impact with third parties
MOR will occur as required by the appropriate NAA, via the formal channels. For example, when operating in
an EU country the ECCAIRS European Reporting Portal will be used:
www.aviationreporting.eu
3.5 Flight team composition
The remote pilot will plan and direct the safe flight operation. The safety of the flight will always remain the
legal responsibility of the Remote Pilot.
In addition to the Remote Pilot and UAS operator, for specific missions there will also be Observers and Payload
Operators. It is the responsibility of the remote pilot to ensure that all members of the team are fully briefed and
technically competent for their respective roles.
3.5.1 Operation of multiple types of UAS
The University of Bristol operates a variety of UAS types. Appropriate training must be given to personnel before
operating a new type.
University of Bristol operations can include multiple UAS operating simultaneously. The UAS remote pilots and
support personnel must ensure that there no radio conflictions, clear communications are established, and that
specific flight-plans have been agreed in advance. A full RA-MS should be submitted to the operations manager
before such a flight takes place.
3.5.2 Qualification requirements
All University of Bristol personnel operating UAS under the Operational Authorisation must have had appropriate
training as required by their roles. The Remote Pilot must hold a recognized national qualification or equivalent.
An example of this is:
• Legacy PFCO qualification No Longer acceptable.
• A2CofC
• GVC
If any University of Bristol remote pilots are unsure of what qualifications they require for their intended
operations they should contact the operations manager in the first instance.
3.5.3 Crew health
All remote pilots, operators and support personnel must ensure that they are in a fit state to carry out the planned
operation. All injuries and illness must be reported to the University of Bristol and no operations must be
undertaken until the affected personnel have been medically cleared for operations.

© University of Bristol 2023 Operations Manual V4.61
Page 20
No UAS pilots, operators or support personnel shall commence a Flying Duty Period (FDP) with a blood alcohol
level in excess of 20 mg of alcohol in 100 ml of blood. This level is one quarter of the United Kingdom legal
driving limit. No members of the UAS team shall consume alcohol less than eight hours prior to the specified
reporting time for flight duty.
No UAS pilots, operators or support personnel shall take medicines or drugs prior to operations that have not
been prescribed by a doctor who is aware of the individual's flight duties. If any doubt exists as to the effects of
a particular medicine or drug, the team member concerned shall consult a specialist in aviation medicine.
A contingency plan must always be included in the pre-flight briefing should the pilot suddenly become
incapacitated. This may include a brief introduction to the necessary flight controls for a safe landing of the
aircraft. A useful pre-flight pneumonic is “I’M SAFE”:
Illness - Is the pilot suffering from any illness which might affect them in flight?
Medication - Is the pilot currently taking any drugs (prescription or over-the-counter)?
Stress - Is the pilot overly worried about other factors in his life?
Alcohol - The pilot should consider their alcohol consumption within the last 8-24 hours.
Fatigue - Has the pilot had sufficient rest and/or sleep?
Eating - Has the pilot had adequate nutrition and/or nourishment?
3.6 Logs and records
Remote pilot logs
It is the responsibility of the remote pilot to ensure that the details of each flight are logged within the
university logging system.
Each individual flight should be added as a discreet entry. Do not concatenate flights into single entries.
Flights can be logged on the drone safety group app here
Refer to AMC1 to UK Regulation (EU) 2019/947, UAS.SPEC.050(1)(d).
UAV maintenance and tech logs
It is the responsibility of the remote pilot to ensure that the UAV tech log is filled in.
Events that must be logged:
• Periodic inspections
• Defects and their repairs
• Modifications
• Firmware/software updates
Tech events can be logged on the drone safety group app here

© University of Bristol 2023 Operations Manual V4.61
Page 21
PART 4. FLIGHT PLANNING AND PREPARATION
4.1.1 Determination of intended tasks and feasibility
The key to any successful UAS operation is careful planning. Ideally this must be done well in advance of any
flights, and a pre-flight visit to the operational site is highly recommended. Careful discussions must be
undertaken with potential clients and all members of the UAS team must be clear on all aspects of the proposed
mission. These include, and are not limited to, the following sections.
4.1.2 Operating site location and assessment
Ideally an on-site survey will be carried out prior to operation days, however at a minimum, current and up to
date Aeronautical Charts, Google Earth and/or Ordnance Survey maps will be used to establish the presence
of the following (where applicable):
• Types of airspace, e.g. controlled airspace
• Any additional aircraft operations (local airfields or operating sites)
• The presence of Hazards such as live firing, gas venting & high intensity radio transmissions etc.
• Any local bye-laws
• Obstructions (wires, masts, buildings etc.)
• Extraordinary restrictions such as segregated airspace around prisons & nuclear establishments
(permissions must be obtained if required for operation)
• Urban and recreational areas
• Assessment of public access
• Permission from Landowner
• Likely operating and alternative sites
• Weather conditions for the planned event
• https://notaminfo.com/ukmap for latest NOTAM information
4.1.3 Risk management
A full risk assessment must be undertaken before any operations. This must include both standard University of
Bristol risk assessments as well as flight specific Risk Assessments. It is the responsibility of the UAS Operator
to ensure that all team members are aware of the contents of these and has contributed fully to them.
Please Note: No matter who is in charge of UAS operations, the final decision to fly, and the
responsibility for the safety of the airframe and the environment, remains with the Remote Pilot.
4.1.4 Communications
It is the responsibility of the UAS mission operator to ensure that all required communications channels are open
and working. These may include, and are not limited to:
• local authorities
• local airfields
• contacts at sites of special interest
• contacts at the perimeter of any cordons or roadblocks in place
• any additional flight operations
• any other teams that are in the vicinity or third parties that are working with the UAS operations
A list of emergency contact numbers must be drawn up and be made available on site, which will include key
personnel to be contacted in the case of any incident or emergency.
There must be an agreed time schedule for testing bespoke lines of communications and these must be tested
as agreed, with the results logged. Any failure in communications must be investigated and operations must
cease until the cause has been established.

© University of Bristol 2023 Operations Manual V4.61
Page 22
A contact number in case of emergency must be provided to all interested parties and must be monitored at all
times during operations.
4.1.5 Pre-notification
If the flight is to be performed within an Aerodrome Traffic Zone (ATZ), or near to any aerodrome or aircraft
operating site, then their contact details should be obtained and notification of the intended operation should be
provided prior to take-off.
It may also be necessary to inform the local police of the intended operation to avoid interruption or concerns
from the public.
4.1.6 Site permissions
All relevant landowners' permissions must be obtained and documented prior to carrying out UAS operations –
and it is the responsibility of the UAS operator ensure that the landowners are aware of the full UAS flight
operations planned.
Agreement from landowners in itself is no guarantee that UAS operations on a particular site is legal, and it is
the responsibility of the UAS operator to ensure that all legal requirements are met before flight operations
commence.
4.1.7 Weather
Weather forecasts must be obtained prior to UAS operations and suitable consideration for the air vehicle
limitations must be made. Flight planning must be made based with full knowledge of the vehicle performance
and flight times adjusted for wind conditions. No flight must be undertaken in conditions which are beyond the
limits stated in the vehicle technical specifications.
Weather forecasts can be obtained from the Met office (or equivalent) prior to operations using:
• www.Metoffice.gov.uk
• www.bbc.co.uk/weather
• A Smartphone ‘WeatherPro’ App
Note: local weather in some areas can change dramatically in short periods of time, and forecasts must only be
used for planning purposes. A local weather survey onsite carried out shortly before operations must also be
recorded.

© University of Bristol 2023 Operations Manual V4.61
Page 23
4.1.8 Preparation and serviceability of equipment and UAS
Key to successful operations is preparation and serviceability of the system. All required maintenance must be
carried out prior to departure for operations, and the maintenance log for the specific airframe must be up to
date and checked.
Pre-use checks must also be carried out prior to departure and all parts of the system must be verified as
working. This includes, but is not limited to:
• airframe
• ground control station
• transmitter
• communications equipment
• spare equipment and tools
• safety equipment
• documentation
Note: on return from operations, it is the responsibility of the UAS operator to ensure that all the equipment is in
a serviceable state. If any maintenance, repairs, or replacements are required, the UAS must inform the required
parties and clearly label any equipment as such.

© University of Bristol 2023 Operations Manual V4.61
Page 24
PART 5. OPERATING PROCEDURES
5.1 Pre-flight procedures
5.1.1 Site Survey
An initial desktop assessment is invaluable when planning operations. This can be done using Google Maps
(www.google.co.uk/maps), Google Earth, https://notaminfo.com/ukmap etc.
Onsite, the UAS Operator and the Remote Pilot (if they are not the same person), must carry out a full visual
check of the operating area and identify any potential hazards. The on-site checklist (see appendices) must be
filled out and a full briefing given to the UAS team.
If there are any third parties on site, or with knowledge of the surroundings, a full briefing of the planned flights
must be given to them and any concerns raised must be acted on. If the site is one that will be flown at regularly,
the site survey must be made available to all UoB UAS operators.
5.1.2 Selection of operating areas and Alternates
The operating area should be carefully chosen and be as open as possible to allow full, uninterrupted views
throughout the flight. Access routes must be identified and all vehicles and people other than those required for
operations must be excluded.
The take-off and landing zone must be in an exclusion zone, at least 30m from any publicly accessed space or
hazardous objects such as trees. The operation zone must be 50m from the public and hazards. Additional
requirements will vary depending on the platform being used:
Rotary wing: a solid, safe and flat landing platform must be provided. Local weather conditions must be
considered, and any possible adverse wind conditions must be identified. Loose gravel or debris which could
become airborne is not suitable, and if required, an artificial landing mat might be used. This must be securely
fastened to the ground.
The egress and ingress routes must be identified as clear, and the landing zone for automatic ‘home’ return
should be identified and kept clear at all times.
Fixed wing: a solid, safe and flat landing area must be identified for any fixed wing operations. If a catapult
launch is used, this must be fixed securely to the ground and located a clear distance away from the landing
zone. Wind direction must be taken into account for all flight operations, in particular the take-off and landing
directions for fixed wing aircraft.
The take-off and landing area must be sufficient to allow an aborted take-off with clear, secure areas leading up
to, and away from, the take-off location. The egress and ingress routes must be clear of any obstructions and
hazards.
For emergency purposes an area of operation not directly above, but in clear view of, the Remote Pilot must be
identified for orbiting purposes.
Alternate: the Remote Pilot must identify an alternate site for recovery of the vehicle if the proposed landing
site becomes unavailable at any point during the flight operation. This should not require any additional
preparation and all operational flight members must be aware of, and agree with, the choice of site.

© University of Bristol 2023 Operations Manual V4.61
Page 25
5.1.3 Crew briefing
Prior to each flight, the UAS Operator should brief the whole team on all aspects of the operation. This will
include, but is not limited to:
• planned operation and objectives
• individual responsibilities & tasks
• flight plan & alternatives available in the case of incident or emergency
• emergency procedures
• identified hazards
• crowd control measures
The UAS Operator should obtain agreement in person from each individual that they have understood their
individual responsibilities & tasks and ensure that they are given ample opportunity to raise any concerns that
they have. All concerns must be treated with respect, and addressed, prior to any operations.
5.1.4 Cordon procedure
Separation criteria should be ensured at all times during flight operations. Should the Remote Pilot deem it
necessary, a taped-off cordon will be established to keep all uncontrolled public outside the operating space.
5.1.5 Communications
All member of the UAS team must be able to communicate with each other at all times. This will be audible when
within range, however beyond this, two-way radios should be used. The UAS operations director is responsible
for ensuring that these are charged and available on the day.
If operating near to adjacent air operations, contact must have been made prior to flight and if requested a direct
(cell or satellite) number must be open at all times. See Section 4.1.4 for communications requirements.
NOTAMs must be issued if appropriate, well in advance, and through the relevant authorities.
5.1.6 Weather checks
Weather forecasts will have been obtained prior to the day of operations. On arrival, these will be updated with
on-site weather checks including, but not limited to:
• wind speed (handheld anemometer)
• wind direction
• cloud cover
• cloud base
• local air pressure
• precipitation
For each flight, at least the wind speed and direction must be recorded. The Remote Pilot must also carry out a
visual inspection of the weather conditions immediately prior to flight, and this must be recorded.
No flying must take place outside of the capability or permissions of either the UAS personnel or the air vehicle
itself. It is the responsibility of the Remote Pilot to ensure that this is the case.
5.1.7 Charging and fitting batteries (Refuelling)
This manual currently only covers the operation of electric aircraft, both fixed wing and rotary wing. Before the
operation of an IC aircraft, this manual must be updated and relevant permissions established. All batteries must
be stored and charged in line with best practice. This will include, but not be limited to, the following:

© University of Bristol 2023 Operations Manual V4.61
Page 26
• batteries must always be numbered and stored in LiPo safe bags
• a log must be kept of all batteries, including charging and use - see appendix
• charging must only take place at an approved charging station, and must be monitored at all times by a
present person
• appropriate emergency equipment must be present and available at all times
• after use, all batteries must be stored at an appropriate storage voltage
• if any unexpected incident occurs with a battery - including impact, damage, or overuse - it must
immediately be removed from operation and disposed of safely
• all batteries must be disposed of through an approved University of Bristol route
5.1.8 Loading of equipment
All equipment used onboard University of Bristol UAS must be within the approved list of payloads and must not
result in the MTOW of the aircraft being exceeded. Contact Dr Tom Richardson for any questions related to
approved payloads.
For approval to attach new equipment, a case must be made that considers all of, but not limited to the following:
• the overall aircraft mass and the MTOW
• power requirements & power supply options
• safety implications on the existing power system – i.e. noise in the system
• RF interference
• Magnetometer calibration
• GPS reception
• possible interference with the existing autopilot through communications or otherwise
• health and safety requirements
• the ability to secure the payload to the airframe securely
• fail-safe operations which preclude operator errors impacting the safety of the flight
All new approved payloads must be updated and recorded by the University of Bristol and made available to the
CAA on a regular basis and on demand.
5.1.9 Preparation and correct assembly of the UAS
It is the responsibility of the Remote Pilot to ensure that the UAS has been correctly assembled and prepared
for flight. For information on COTS systems, the manual for each must have been downloaded and read prior
to operations and followed throughout to ensure safe operations. A paper version of the technical and instruction
manuals must be taken to the flying site and must be available throughout flight operations.
For bespoke UoB aircraft which have been designed and assembled in house, the Remote Pilot must ensure
that they are fully aware of all aspects of their operations prior to flight. A paper copy of all elements must be
available at the flying site including the autopilot, communications equipment, radios, GCS etc. The Remote
Pilot must clarify any outstanding questions with Dr Tom Richardson prior to flight operations.
5.1.10 Pre-flight checks on UAS and equipment
As above, it is the responsibility of the Remote Pilot to ensure that all Pre-flight checks have been carried out
prior to flight operations. For COTS equipment, these can be found in the online manuals and technical
instructions, for bespoke University of Bristol these must be taken from the paper copy of all individual elements,
e.g. autopilot. It is the responsibility of the Remote Pilot to ensure that they are fully aware of all required Pre-
flight checks for the aircraft being flown. The Remote Pilot must clarify any outstanding questions with Dr Tom
Richardson prior to flight operations.

© University of Bristol 2023 Operations Manual V4.61
Page 27
Note: The Remote Pilot will carry out a full pre-flight inspection of the vehicle prior to every flight, but there will
also be elements contained within the pre-flight checklist.
5.2 Flight procedures
With all previous sections complete, a full test plan will be created and executed for each flight. This will include
confirmation of the following, but is not limited to:
• all relevant permissions have been sought for the area of operation
• site and weather assessments have been carried out
• operations are in accordance with CAA or relevant NAA rules and regulations
• sufficient insurance is in place
• a qualified safety pilot is available and will be fully briefed
• all other required personnel have been identified and fully briefed
• a person has been identified who has overall responsibility for operations. This may be the pilot or a
ground controller – Note: The Remote Pilot retains responsibility for the aircraft safety at all times
• the aircraft is airworthy and has undergone relevant pre-flight checks
• the area is secure and suitable for flight operations including primary take-off and landing sites, and
alternate areas
• all onboard payloads and systems are operating correctly
• A suitable operator number is affixed to the aircraft.
• emergency procedures and contact numbers are known and available
• correct flight procedures are adhered to at all times
• all relevant logs and records for the aircraft are maintained
• any accidents or incidents are documented and reported
All documentation must be filled out and completed by the appropriate person. Prior to the commencement of
any flight, an appropriate checklist must be created and agreed upon by all members of the team. This
must be updated after each flight, and at the end of each set of operations, a copy of this checklist and all
documentation associated with the flight operations must be sent to Dr Tom Richardson.
5.2.1 Start
The Remote Pilot will have carried out a full inspection of the airframe and systems, and once satisfied, will
connect the power, and the ground support crew will test the onboard and off-board systems to ensure that all
parameters are within limits. This must be done via a checklist, examples of which can be found in the
appendices, and verbal confirmation must be obtained for each element.
Fail-safe modes and operation must have been agreed upon prior to flight and these must be tested without
power to the motors to ensure that the flight controllers enter the correct modes and waypoint requirements on
demand and on loss of radio link.
Just prior to Take-off, there must be a verbal confirmation of Go/No-go from each member of the operations
team. The final decision on Take-off remains with the Remote Pilot.
5.2.2 Take-off
The Remote Pilot will confirm with the crew that they are happy for him to take-off and will advise as necessary.
Observers will remain in verbal contact with the Remote Pilot at all times throughout the flight and advise him of
any possible incursions, either on the ground or in the air. Operations for rotary and fixed wing aircraft will be:
Rotary wing: the Remote Pilot will take off and hover the aircraft at a safe distance from the ground operations
to ensure that all systems are working correctly. They will also check the different modes available, e.g. Loiter.

© University of Bristol 2023 Operations Manual V4.61
Page 28
Once the Remote Pilot has confirmed verbally with the ground control operator that all systems are operating
nominally then they will continue with the mission.
Fixed wing: a power check must be carried out just prior to take-off in an agreed safe and controlled manner.
A final check on the control surfaces must be made for correct sense and deflection limits. Take-off may be by
catapult, a fully briefed and trained operator for hand launch, or using the undercarriage on a suitable runway
(see previous Section 5.1.2). Once airborne the Remote Pilot must confirm correct flight operations in an
appropriate circuit away from UAS operators and check the available flight modes. Once the Remote Pilot has
confirmed verbally with the ground control operator that all systems are operating nominally then they will
continue with the mission.
5.2.3 In-flight
Constant communication must be always maintained between the UAS operations team. Communications with
the Remote Pilot must be kept brief and succinct to avoid distraction, and any changes to the flight plan must
be communicated immediately and clearly.
In the event of an early termination of the flight plan, this must be communicated in a pre-arranged manner to
the Remote Pilot, who retains overall responsibility for the aircraft and can terminate the mission at any
point.
The Remote Pilot must also ensure that the following requirements are met:
• they must not cause or permit any article or animal (whether or not attached to a parachute) to be
dropped from a UAS so as to endanger persons or property
• they must maintain direct, unaided visual contact with the aircraft sufficient to monitor its flight path in
relation to other aircraft, persons, vehicles, vessels and structures for the purpose of avoiding collisions
– unless permissions have been given to operate non-line-of-sight. Irrespective of this however, at all
times though they must ensure that there is no danger of collision
• they must not fly the aircraft:
o in Class A, C, D or E airspace unless the permission of the appropriate air traffic control unit
has been obtained
o within an aerodrome traffic zone during the notified hours of watch of the air traffic control unit
(if any) at that aerodrome unless the permission of any such air traffic control unit has been
obtained
• they must not fly the aircraft at a height of more than 400ft from the surface unless permission of the
CAA or relevant NAA has been obtained, or the ATC unit in any flight restriction zone
• they must not fly the aircraft within the flight restriction zone of a protected aerodrome either: during any
ATC unit’s hours of watch unless permission of the ATC unit has been obtained; or outside any ATC
unit’s hours of watch unless permission of the aerodrome operator has been obtained.
• the flight restriction zone consists of the ATZ of a protected aerodrome, the runway protection zones
and any additional boundary zones.
The Remote Pilot must not fly a UAS in any of the following circumstances except in accordance with a
permission issued by the CAA or relevant NAA:
a) over or within 150 metres of any congested area
b) within 50 metres of any vessel, vehicle or structure which is not under the control of the UAS
Operator; 30m during take off and landing
Relevant information, such as a risk of collision, low battery voltage or reduced radio strength, must be made
available to the Remote Pilot at all times, and brought to his attention in a succinct way with a verbal confirmation.

© University of Bristol 2023 Operations Manual V4.61
Page 29
5.2.4 Landing
The Remote Pilot must alert the UAS operations team that he is landing, with sufficient time to allow for observers
to check the landing site and ensure that all personnel and public are at a safe distance.
If appropriate, GCS operators can keep the Remote Pilot updated with relevant flight parameters to aid landing;
this must be done clearly and succinctly to avoid distraction.
Rotary wing: the Remote Pilot will slowly bring the aircraft into a hover over the landing site and check for
correct operation through to touch down where they will reduce the throttle to zero.
Fixed wing: the Remote Pilot may choose to fly a circuit prior to touch-down to check for correct operation of
the aircraft, and will aim to touch down, into wind, approximately one quarter of the way along the runway. After
touch-down the Remote Pilot may choose to slowly taxi the aircraft back to their position, but they must make
their intentions clear to all UAS personnel prior to movement. Once in position they will reduce the throttle to
zero.
5.2.5 Shutdown
Upon landing, the Remote Pilot will ensure that all motors are disarmed. After this, on agreement with the GCS
operator, the Remote Pilot will approach the aircraft and disconnect the power from the motors. The aircraft will
then be safely removed from the landing site.
The purpose of the agreement with the GCS operator is to ensure that no onboard systems are shut down
prematurely, however the Remote Pilot can disconnect the power at any point if they deem it necessary.
5.3 Emergency procedures
5.3.1 Appropriate to the UAS and control system
Loss of Primary Control
If the Remote Pilot loses primary control they should:
• alert the UAS operations team and if available, ask for confirmation of link strength
• check that the transmitter is still switched on and that there is sufficient battery power
• switch the transmitter off and then back on again if control is not regained.
• if the aircraft remains unresponsive they should then switch off transmitter.
o Rotary wing aircraft: Failsafe RTH will be initiated and the aircraft will return to home and land
after a pre-specified time period. The Remote Pilot will issue warnings to those present and
monitor the aircraft visually as it returns.
o Fixed wing aircraft: Agreement will have been made prior to the flight operations for
appropriate Failsafe RTH behaviour, depending on the operational environment and proposed
mission. This will be included in the pre-flight plan. Possible behaviours might include anything
from full control deflections and zero throttle to ensure rapid descent through to an automatic
landing at a pre-defined landing zone. The Remote Pilot will issue warnings to those present
and monitor the aircraft during the remainder of the flight.
• Following recovery, it is the responsibility of the Remote Pilot to document circumstances of the incident
and notify both the University of Bristol and the relevant authorities where appropriate.
Loss of propulsion
Rotary wing with redundancy, e.g. Octocopter or Fixed wing: If power is lost to one motor, the Remote Pilot
must immediately land the aircraft in a safe location. They must alert the UAS operations team with audible
warnings and make all personnel aware of an impending landing.
Fixed wing: In the event of a loss of propulsion on a fixed wing aircraft the following action must be taken.

© University of Bristol 2023 Operations Manual V4.61
Page 30
• On Launch:
o If safe to do so, land ahead
o If unsafe to land ahead, turn the aircraft into wind where possible to minimise ground speed,
and aim for the pre-appointed alternate. Maintain appropriate speed to prevent loss of control.
o Under no circumstances direct the aircraft towards people or property.
• In flight:
o Trim the aircraft for best glide, select an appropriate area to touch down (into wind, clear of
obstacles). Aim for a fully held off landing.
In the event of a complete loss of control it is necessary to alert bystanders to the danger. In the event of a
crash, secure the crash site and contact the appropriate emergency services. In the event of a flyaway,
immediately inform local ATC and local Police.
Rotary wing without redundancy, e.g. quadrotor, or loss of multiple motors: the Remote Pilot must immediately
endeavour to regain control using throttle, arm, disarm. If the aircraft is likely to experience an uncontrolled
landing, they must alert the UAS operations team with audible warnings and make all personnel aware of an
impending landing.
For both types of incidents all data and evidence should be collected and documented by the Remote Pilot and
submitted to the University of Bristol and to the CAA or relevant NAA as necessary.
Aircraft battery failures
If a battery fails or appears to fail during flight, the Remote Pilot must treat it as a loss of power and follow the
procedures given for loss of propulsion above. Once recovered the battery must be safely removed and disposed
of in accordance with the procedure for any battery that has demonstrated abnormal performance.
Batteries that have been identified as such should immediately be labelled so they are not used in subsequent
flights.
Transmitter or transmitter battery failure
The transmitter battery level should be monitored as part of the pre-flight checklist. If the Remote Pilot becomes
aware of low transmitter battery level or abnormal transmitter behaviour at any point during the flight, they should
immediately attempt to land the aircraft in a safe and controller manner and alert the UAS operations team as
to the problem and their intentions.
The Remote Pilot will then power down the aircraft as normal and identify the cause of the problem. No further
flights will take place until the Remote Pilot and UAS operations team are satisfied that they have identified and
rectified the cause of the problem.
For complete failure of the transmitter, the Remote Pilot will follow the procedures given above for Loss of
Primary Control and alert the UAS operations team with audible warnings.
GCS failure
If any member of the UAS operations team becomes aware of a GCS failure, then the Remote Pilot should
immediately be made aware in a clear and succinct manner. The Remote Pilot should verbally confirm that they
have received the notification and immediately bring the aircraft in to land safely.
Before any further flights, the cause of the failure should be established and rectified to the satisfaction of all. A
full report with all relevant information should be made to both the University of Bristol and the CAA or relevant
NAA where relevant.
Malicious or accidental interference with control frequency

© University of Bristol 2023 Operations Manual V4.61
Page 31
If the Remote Pilot becomes aware of any interference to the aircraft through the radio link or the aircraft is
behaving in a suspicious manner, or not responding to control inputs, they shall attempt to land the aircraft
immediately. The source of the interference will be thoroughly investigated and the aircraft shall not fly again
until the Remote Pilot is satisfied that it is safe to do so. A report of the incident will also be sent to the University
of Bristol and to the CAA or relevant NAA where it is deemed necessary.
Aircraft incursion
If another air user enters the VLOS operational area of the UAS, the Remote Pilot will immediately land the
aircraft. If possible, they shall investigate who is in control of the other aircraft and warn them of UAS operations
in the area. An AIRPROX report shall be made to the University of Bristol and CAA, or relevant authorities, in
any incident where it is deemed necessary.
Fly away
Should a fly away occur, i.e. the aircraft moves away without any command being possible or any control input
from the Remote Pilot then they must:
• note the aircraft’s flight path, height and speed
• inform the Police and local ATC
• attempt to trace and recover the aircraft
• submit a written report to the CAA or relevant NAA and University of Bristol providing all relevant
information
Abnormal Environmental conditions - Unexpected Precipitation
Should the weather conditions change during flight such that the weather limits of the UAV being operated are
likely to be exceeded then the flight should be ended as soon as possible. If possible the remote pilot should
land the UAV back at the take off location. In extreme situations they may choose to land anywhere safe within
the flight operation area. A UAV that has been subjected to heavy rain should be inspected for water ingress
before further flight.
Abnormal Environmental conditions - Unexpected high winds or turbulence
Should the weather conditions change during flight such that the weather limits of the UAV being operated are
likely to be exceeded then the flight should be ended as soon as possible. If possible the remote pilot should
land the UAV back at the takeoff location. In extreme situations they may choose to land anywhere safe within
the flight operation area. In high wind situations a reduced altitude may enable a greater ground speed.
Abnormal Environmental conditions - Unexpected low temperature
Should the weather conditions change during flight such that the weather limits of the UAV being operated are
likely to be exceeded then the flight should be ended as soon as possible. If possible the remote pilot should
land the UAV back at the take off location. In extreme situations they may choose to land anywhere safe within
the flight operation area. Specific note should be taken to consider crew performance in unusually cold
conditions as well as reduced performance of batteries and propulsion units.
5.3.2 Fire
For all fire incidents, the primary concern is the safety of all personnel. Appropriate firefighting equipment must
be on site at all times and must be available immediately to safeguard personnel. No attempt should be made
to tackle fires unless absolutely necessary, and the UAS Operator should act quickly and efficiently to evacuate
the area and immediately alert the relevant emergency services.
Once all personnel are safe, a full report must be made to the University of Bristol providing all the relevant
information.

© University of Bristol 2023 Operations Manual V4.61
Page 32
5.3.3 Accidents
It is the responsibility of the UAS Operator to identify the first aid trained members of the team prior to flight
operations. There must be at least one member of the team who is trained in basic first aid, and emergency
numbers must be made available to all.
In the event of an accident, flight operations must cease immediately and the Remote Pilot must land the aircraft.
The primary concern of the UAS team must be the health and well-being of all team members and emergency
medical aid must be sought immediately when required.
As soon as possible, a full report with all the relevant information must be submitted to the University of Bristol
and when appropriate to the CAA or relevant NAA.
5.3.4 Pilot incapacitation
Prior to take off, all members of the UAS team must have been briefed on the basic controls of the transmitter
and the operation of the aircraft. If the Remote Pilot becomes incapacitated due to illness or any other reason
whilst the aircraft is in flight, another member of the UAS operations team will take over and land the aircraft.
If manual control is not possible, the designated UAS team member will initiate the failsafe process for RTH if
Rotary wing or the agreed behaviour if Fixed wing.
As soon as possible, a full report with all the relevant information must be submitted to the University of Bristol
and where appropriate to the CAA or relevant NAA.
Please Note: All elements of this UAS Operations Manual must be adhered to at times. If any member of the
UAS team becomes aware of any errors or omissions, it is your responsibility to immediately report them to Dr
Tom Richardson.

© University of Bristol 2023 Operations Manual V4.61
Page 33
PART 6. Fenswood Farm Field Robotics Centre
6.1.1 Introduction:
To support the wealth of research that uses UAS the Flight Research Laboratory has established the
field robotics centre at Fenswood Farm, Long Ashton. At this facility it is possible to conduct test-flights as part
of research or to undertake pre-deployment training.
Accessible to authorised UOB remote pilots only.
This unique resource is made available with the kind support of the farm manager, any abuse of the site
could have detrimental repercussions for everyone involved in UAS research. For clarification on any detail,
queries should be directed towards the flight operations manager.
6.1.2 Proximity to Bristol International Airport
Fenswood Farm sits outside the North Eastern edge of the Bristol ATCZ. The flight research lab has a
working relationship with the airport. Notification to the airport is NOT required for standard flights below 500ft
AGL conducted inline with the UOB flight operations manual.
Operation up to 1000ft AGL is currently NOT PERMITTED
Figure 1 - Bristol Airport drone exclusion zone and location of Fenswood Farm

© University of Bristol 2023 Operations Manual V4.61
Page 34
6.1.3 How to use Fenswood Farm – New user
1. Contact the UAS operations manager to discuss your requirements in advance.
2. Depending on your requirements, complete a RA or use the generic one if applicable. (Ops. manager
will advise)
3. Undertake an induction and initial flight at the farm under supervision.
4. Be added to the list of authorised users.
5. Before each intended flight day, notify the operations manager and farm manager of your intent to fly.
6.1.4 Upon arrival
1. Park on the gravel carpark near the runway. Do not drive on the grass under any circumstances.
2. Complete the arrival checklist (see operations manual)
3. Setup equipment on the edge of the runway.
4. All spectators or non-involved people should stand a safe distance back on the carpark behind the
crowd line.
5. Ensure the area is clear of walkers before commencing flight.
6. Observe no fly zones (Roads, railway etc) at all times.
All operators and remote pilots using the facility should familiarise themselves with the procedures laid out in
the operations manual and pay specific note to the hazards and restrictions. A map of the site showing the
restricted areas and hazards can be seen here: LINK

© University of Bristol 2023 Operations Manual V4.61
Page 35
6.1.5 Fenswood Farm Contact Details
Initial enquiries to book and use the flight testing facilities should be directed towards the flight research
lab.
Flight Research Lab and Operations management
Mr Duncan Hine
Technical Specialist (UAS) - Flight Operations Manager
Department of Aerospace Engineering
Email: duncan.hine@bristol.ac.uk
Phone: +44 (0) 7931 407 140
Dr Tom Richardson
Senior Lecturer, Flight Dynamics and Control
Department of Aerospace Engineering
Email: thomas.richards[email protected]
Phone: +44 (0) 7803 012 862
Emergency contact details
Mr Andrew Hughes
Farm and Glasshouse Manager, Fenswood Farm.
Email: Andrew.hughes@bristol.ac.uk
Phone: +44 (0) 1275 394201Supporting Documents

© University of Bristol 2023 Operations Manual V4.61
Page 36
6.2 Current Operational Authorisation PDRA01
(26
th
Oct 2023 – 26
th
Oct 2024)

© University of Bristol 2023 Operations Manual V4.61
Page 37

© University of Bristol 2023 Operations Manual V4.61
Page 38

© University of Bristol 2023 Operations Manual V4.61
Page 39

© University of Bristol 2023 Operations Manual V4.61
Page 40

© University of Bristol 2023 Operations Manual V4.61
Page 41

© University of Bristol 2023 Operations Manual V4.61
Page 42

© University of Bristol 2023 Operations Manual V4.61
Page 43

© University of Bristol 2023 Operations Manual V4.61
Page 44
PART 7. Pre deployment RAMS guidance
7.1.1 UAS Pre-deployment Risk Assessment and Method Statement (RAMS)
This form is to be filled in before departure and will aid you in planning a safe and legal flight.
No flight is permitted until the RAMS has been signed by the relevant H&S advisor.

© University of Bristol 2023 – V4.61
UAS Pre-deployment RAMS
Risk Assessment & Method Statement
Date:
Assessed by: (competent person)
Checked by: (supervisor, PI, manager)
Assessment ref no:
Review date:
Flight Team Composition
Registered Operator:
Operator number:
Remote Pilot:
Flyer ID number:
GCS Operator:
Other Crew:
UAS Details
UAV Model:
U.O.B Registration:
Type of UAS:
Multirotor
Fixed
Wing
M.T.O.M (KG):
Intended payload:
Operating Site Location
Site Name
Nearest address:
Site
Owner/representative
Owner contact details:
Site Lat/Long
Altitude (AMSL) (m)
Has permission been
granted?
YES
NO
Is the site within a geo-restricted area, or in proximity to an airport or other
sensitive zone?
No
Yes

© University of Bristol 2023 Operations Manual V4.61
Page 46
Google Earth map URL:
Maximum altitude AGL:
Flight area drawn on screenshot of map (google earth or valid aviation chart):

© University of Bristol 2023 Operations Manual V4.61
Page 47
What is the objective or purpose of the flights at this location
e.g. Gathering dust samples for volcano modelling.
Describe the flight operations that will be conducted to meet the above objectives.
e.g. number of flights, intended duration, flight profile, site specific requirements etc.

© University of Bristol 2023 Operations Manual V4.61
Page 48
General assessment of risks
Identify and provide mitigations against all risks specific to the location and operation you have outlined. Use multiple pages if required.
Description of hazard
Potential outcome
Control measures to be put in
place
A
B
Risk
Rating (A)
x (B)
Comments/actions

© University of Bristol 2023 Operations Manual V4.61
Page 49
Key for Risk Assessment table
Score to be allocated:
3
2
1
A – Severity of incident:
Major injury, death or damage to
property
Injury or damage requiring medical
treatment
Minor or no injury/damage
B – Likely occurrence
Regular exposure
Occasional exposure
Exposure very rare.
Resultant risk rating
(AxB)
Response required
<3
No real change in procedure required.
3-4
Provide additional training, supervision and monitoring.
6
Critically examine the areas of exposure to risk in the operation and investigate
alternative locations or operating conditions to reduce risk rating.
9
Operation can not go ahead until controls to reduce risk are agreed.

© University of Bristol 2023 Operations Manual V4.61
Page 50
Method Statement
Describe detailed steps on how to complete the tasking and avoid the risks identified. IE. How will you complete your objectives safely and
within the law.
For any points in the risk assessment where you feel further clarity is required you should expand on your proposed “control measure to be put in place”.
Outline precisely how you will conduct your operations being specific about processes and procedures you are putting in place to fully mitigate that risk.

© University of Bristol 2023 Operations Manual V4.61
Page 51
Signatures of acceptance
By signing here you acknowledge the risks outlined above and agree to abide by the approved risk mitigations. Additionally you agree to abide by the UOB
flight operations manual and all laws as laid out in the ANO at all times. If in doubt you agree to seek guidance before commencing any flight.
Name(s)
Job Title/status
Signature
Date
Registered Operator
Remote Pilot
Advisor
H&S representative
Technical manager (if lab
based)

© University of Bristol 2023 – V4.61
7.2 Checklists and useful documents
It is recommended that each aircraft have its own quick reference handbook (QRH), this should contain all of
the relevant information about aircraft limits, procedures and safety systems. An example of a DJI Mavic QRH
is attached along with a set of generic examples of checklists and procedures to aid Remote Pilots to plan
their flights.

© University of Bristol 2023 Operations Manual V4.61
Page 53
7.2.1 Quick Reference Handbook DJI Mavic 2 Pro
Section
Content
F
Field File
F1
Brief description of UAS
F2
Link to full specification and manual
F3
Operational envelope
F4
Likely outcome of failure of motor, propeller or ESC
F5
Battery Management
F6
Pre-deployment checklist
F7
Pre-flight procedures
F8
Flight procedures
F9
Post-flight procedures
F10
Emergency procedures
F11
Incident management
M
Maintenance File
M1
Full aircraft specification
M2
Remote Controller LCD Screen Menu Information
M3
Aircraft-specific maintenance details

© University of Bristol 2023 Operations Manual V4.61
Page 54
Section F: Field File
This document is intended for quick reference during operations. Any Remote Pilot (RP) operating the DJI Mavic
2 Professional must ensure they are fully familiar with manufacturer operating manuals and the capabilities of
the UAS.
F1: Brief description of UAS
The DJI Mavic 2 Pro is produced by DJI. It is piloted using a dedicated transmitter in conjunction with either
manufacturer or third-party apps that may be accessed using an Android or iOS phone. Thanks to its foldable
design the Mavic is smaller, lighter, and easier to carry. Its OcuSync transmission system has a longer
transmission range and 1080p resolution.
F2: Link to full specification and manual
Full aircraft specifications
DJI Mavic 2 Pro: https://www.dji.com/mavic-2/info
User Manuals
DJI Mavic 2 Pro: https://www.dji.com/mavic-2/info#downloads
F3: Operational envelope
Parameter
Limitations
Maximum wind speed
8 to 10.6m/s - 18 to 23.6mph- 15.7 to 20.5kt
Maximum service altitude
19,685 feet AMSL (6000m)
Maximum aircraft speed
20m/s – 44.7mph – 38.9kt (Sport mode)
Operating temperature range
-10
o
C to +40
o
C
Maximum ascent rate
16.4 ft/s (5 m/s) in Sport mode
13.1 ft/s (4 m/s) in Positioning mode
Maximum descent rate
9.8 ft/s (3 m/s) in Sport mode
9.8 ft/s (3 m/s) in Positioning mode
Operating frequency
2.4-2.483 GHz
Maximum take-off mass (MTOM)
907g
Flight time
Approx. 31 minutes
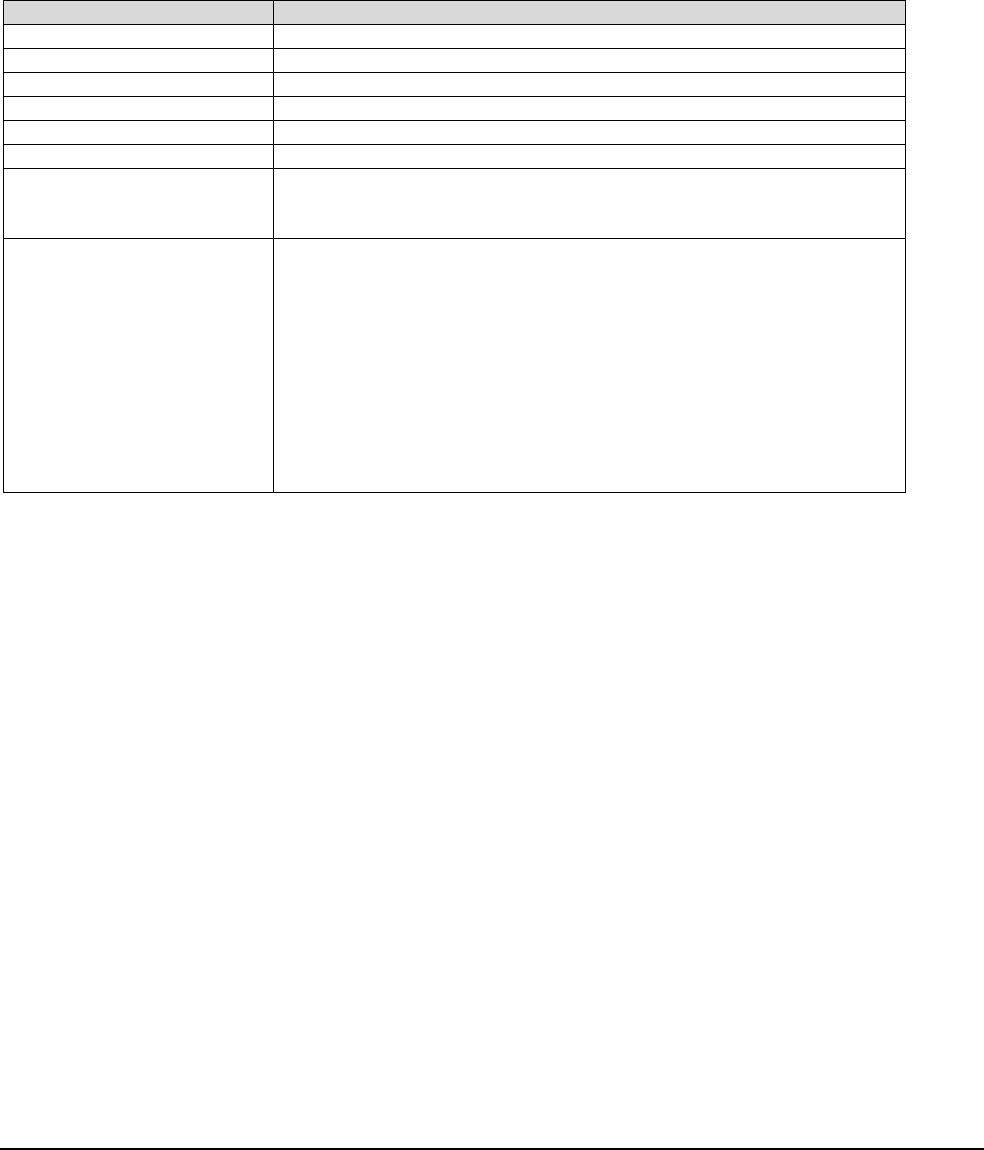
© University of Bristol 2023 Operations Manual V4.61
Page 55
F4: Likely outcome of failure of motor, propeller or ESC
The DJI Mavic 2 Pro a quadcopter. As a result, there is no redundancy in the event of propeller or ESC failure
and the aircraft is likely to enter uncontrolled vertical descent.
F5: Battery Management
Battery details for the DJI Mavic 2 Pro are as follows:
Item
Detail
Battery type
Intelligent lithium polymer battery
Number required for flight
1
Battery capacity
3850mAh
Battery voltage
15.4V
Watt hours
59.3Wh
Charger type
DJI smart charger
Charge instructions
Sit the charger in a safe location on a non-flammable surface. Attach
batteries to smart charger. Observe batteries initially to ensure that
charge initiates.
Additional instructions
Batteries must be periodically discharged to below 5% as directed
within the DJI app. The charger should only be set up by a crew
member who is familiar its use and the battery being charged should
be monitored. Lithium-polymer batteries can become unstable. The
two main causes of this are damage during a crash and improper
charging. Any battery that is noticeably swelling should be placed in a
safe place. There have been occasions when lithium polymer
batteries have burst into flame. If a battery is involved in a crash, it
should not be used for the remainder of the operation until it has been
checked by the Technical Manager even if it appears undamaged and
the UAS is operational.

© University of Bristol 2023 Operations Manual V4.61
Page 56
F6: Pre-deployment checklist
Item
Check
UAS
All components in case – no open defects in log
Spare propellers
Present
Batteries
All present and charged
Chargers
All present
Camera(s)
All present including filters
Media Cards
All present, functional and formatted
Tablet/phone
Present, charged, correct APPs installed and functional
USB cable
Present, functional
Laptop
Present if appropriate and charged
PPE
Present
Cordon equipment
Present if appropriate
Anemometer
Present
Fire extinguisher/blanket
Present and functional
First aid kit
Present and stocked where needed

© University of Bristol 2023 Operations Manual V4.61
Page 57
F7: Pre-flight procedures
Stage
Item
Check
1
Ensure all crew members and participants are briefed
2
Attach tablet/phone to transmitter
3
Unfold arms and ensure secure
4
Insert aircraft battery – ensure secure
5
Ensure SD card inserted
6
Check airframe for damage
7
Check sonar sensors and optical flow system clean
8
Check motors for resistance and bearing damage
9
Unfold propellers and check for damage and stress lines
10
Remove camera cover and retainer
11
Power transmitter and ensure app initiates
12
Move aircraft to launch location
13
Call “power on”
14
Power aircraft
15
Check command and control link
16
Carry out compass calibration if necessary
17
Check camera control and settings
18
Check flight mode (T, P, S)
19
Check GPS strength (app)
20
Check Tx and AV signal strength (app)
21
Check battery level, cell balance and low battery settings (app)
22
Check home point is correct (app)
23
Check failsafe and geofencing set appropriate to operation (app)
24
Ensure all crew members and participants are ready

© University of Bristol 2023 Operations Manual V4.61
Page 58
F8: Flight Procedures
Stage
Item
Start-up procedures
1
Call “starting motors”
2
Final 360 check, call “taking off”
3
Use combined stick command or auto take off to start motors
4
Ensure motors are all running
Take-off procedures
5
Raise throttle and settle aircraft at 2 metres height
6
Check UAS response to all stick movements
7
Commence operational flight
Flight procedures
8
Maintain VLOS at all times
9
Monitor aircraft for position relative to structures and people
10
Monitor aircraft status
11
Monitor flight time
Landing procedures
12
At a safe altitude, return to landing point.
13
Call “landing”
14
Check landing point is clear
15
Slowly descend UAS to land
16
Hold throttle down to cut motors
Shut-down procedures
17
Ensure propellers are static
18
Turn off UAS
19
Call “safe”

© University of Bristol 2023 Operations Manual V4.61
Page 59
F9: Post-flight Procedures
Stage
Item
Check
1
Check propellers for damage and fold
2
Check airframe for damage
3
Remove (and back up) SD card if required
4
Replace camera retainer and cover
5
Remove aircraft battery if necessary
6
Ensure all components are turned off
7
Repack components and UAS
8
Check site is clear and left as found

© University of Bristol 2023 Operations Manual V4.61
Page 60
F10: Emergency Procedures
RPs should take the time to review this section before flight and to understand the procedures to implement in
different emergency situations.
10.1: Mitigation Measure - DJI failsafe
This UAS uses the DJI failsafe return-to-home system. In the event of Tx signal loss it will carry out the following:
1. hover for 3 seconds
2. ascend to user defined height (or remain at current height if already above defined height)
3. move to a position over the “home” point
4. descend at a rate of 0.5 m/s and auto-land
5. Switch off motors after 3 seconds
The UAS can then be shut-down.
This procedure can also be initiated from the APP or by holding the return-to-home (RTH) button on the Tx.
10.2: Mitigation Measure – DJI geofencing
All DJI systems can be restricted to preset distance limits to reduce the risk of fly-away. It is recommended that
the distance and height limit are set to the minimum distance required to carry out each project.
10.3: Crew warning
If at any time the craft descends in an uncontrolled measure the RP should shout “HEADS” to warn crew
members. The briefing should include what action any crew should take on hearing the shout. The response
may vary by operation.
10.4: Responses to emergency situations
Loss of primary control frequency including Transmitter battery failure
In the event of loss of control frequency, including Tx failure or Tx battery failure, the aircraft will enter
failsafe as described above. At this point it is the responsibility of the RP/crew to maintain the take-
off area clear.
Malicious or accidental interference with control frequency
In the event of interference with the control frequency, it is highly likely that the aircraft will enter
failsafe and return to base. If that is not the case then the incident should initially be treated as a fly-
away as described below. Once the aircraft is safely recovered, the cause of the interference should
be investigated and reported appropriately.

© University of Bristol 2023 Operations Manual V4.61
Page 61
Loss of power or aircraft battery failure
In the event of power loss to the flight controller or motors, the aircraft may crash, normally vertically.
As a result it is important that the area below the aircraft is maintained clear and that people in the
area are aware of the potential risk. If possible the “HEADS” warning should be given.
Remote Pilot incapacitated
In the event of the RP becoming incapacitated whilst the UAS is in flight the aircraft will remain in
hover and descend vertically to land under low battery voltage. If crew or observer are used,
instructions can be given on how to initiate RTH in the event of RP incapacitation.
Aircraft incursion
If another aircraft is seen and appears to be entering or approaching the operating area the RP
should descend the UAS until it is clear there is no risk and may then continue the operation or land
in the take-off area and wait if necessary. If possible “AIRCRAFT” warning should be given.
Propeller or motor failure
On loss of a propeller or motor it is likely the UAS will enter uncontrolled descent. In this case the
priority is the safety of the public, client and crew so the key mitigation is avoiding the presence of
crew or public immediately below the flight path. If possible the “HEADS” warning should be given.
Total electronic failure
If this occurs it is likely that the UAS will enter uncontrolled descent. If possible the “HEADS” warning
should be given. If injury occurs it should be ascertained if emergency services are needed and first
aid carried out as necessary. As soon as is appropriate the UAS must be made safe by disconnecting
the flight battery. Once the situation has been dealt with the incident must be logged and reported
appropriately.

© University of Bristol 2023 Operations Manual V4.61
Page 62
“Fly-away”
Fly away is heavily mitigated by the distance limiting feature of the DJI flight controller. The RP should
ensure that an appropriate maximum distance and height are programmed for each operation up to
a maximum of 500m horizontally and 400 feet (122m) from the surface.
In the event of a “fly-away” the RP should attempt to regain control:
1) Attempt atti mode flight if GPS has been lost
2) Attempt RTH
3) Attempt to force failsafe by turning off transmitter
4) Turn transmitter back on and if appropriate attempt to cut motors (CSC)
If above fails, log the direction, speed, altitude and estimated flight time of the UAS and immediately
contact the Police and local ATC to inform them. If safe to do so the UAS should be tracked until it
lands under second-level low battery protection.
Fire in the air
If control is still possible, attempt to land the aircraft away from crew and on a non-flammable surface.
Follow procedures below.
Fire on the ground
Allow the battery fire to burn out.
Prevent the spread of flame if necessary, using the fire extinguisher/blanket. Avoid smoke inhalation
as the smoke is toxic.
If necessary, contact fire services.

© University of Bristol 2023 Operations Manual V4.61
Page 63
F11: Incident management
In the event of an incident the RP should follow the procedures below. In the event of injury, the casualty is the
priority. If necessary, emergency services should be contacted.
In the event of an incident causing injury or fatality
Stage
Item
Check
1
Make the UAS safe by removing flight battery if possible
2
Administer first aid as necessary
3
Contact emergency services if necessary
4
Any injured person remains the priority until they are stabilized and if
necessary, paramedics have taken control
5
Take witness statements if appropriate
6
Photograph the scene to show position of the UAS
7
Ensure any footage is retained to show as evidence
8
Repack components and UAS
9
Log the details of the accident and report as necessary
In the event of an incident not causing injury or fatality
Stage
Item
Check
1
Make the UAS safe by removing flight battery if possible
2
Monitor flight battery for swelling and/or fire
3
Take witness statements if appropriate
4
Photograph the scene to show position of the UAS
5
Ensure any footage is retained to show as evidence
6
Log the details of the accident and report as necessary
After any accident or incident, the RP should ensure that all appropriate logs are completed and that, if
appropriate, the incident is reported. No further flights should be carried out until the cause of the incident is
established and any risk of re-occurrence is mitigated.
A mandatory occurrence report can be raised online at:
http://www.aviationreporting.eu/

© University of Bristol 2023 Operations Manual V4.61
Page 64
Section M: Maintenance File
M1: DJI Mavic 2 Pro - Full specification

© University of Bristol 2023 Operations Manual V4.61
Page 65

© University of Bristol 2023 Operations Manual V4.61
Page 66

© University of Bristol 2023 Operations Manual V4.61
Page 67
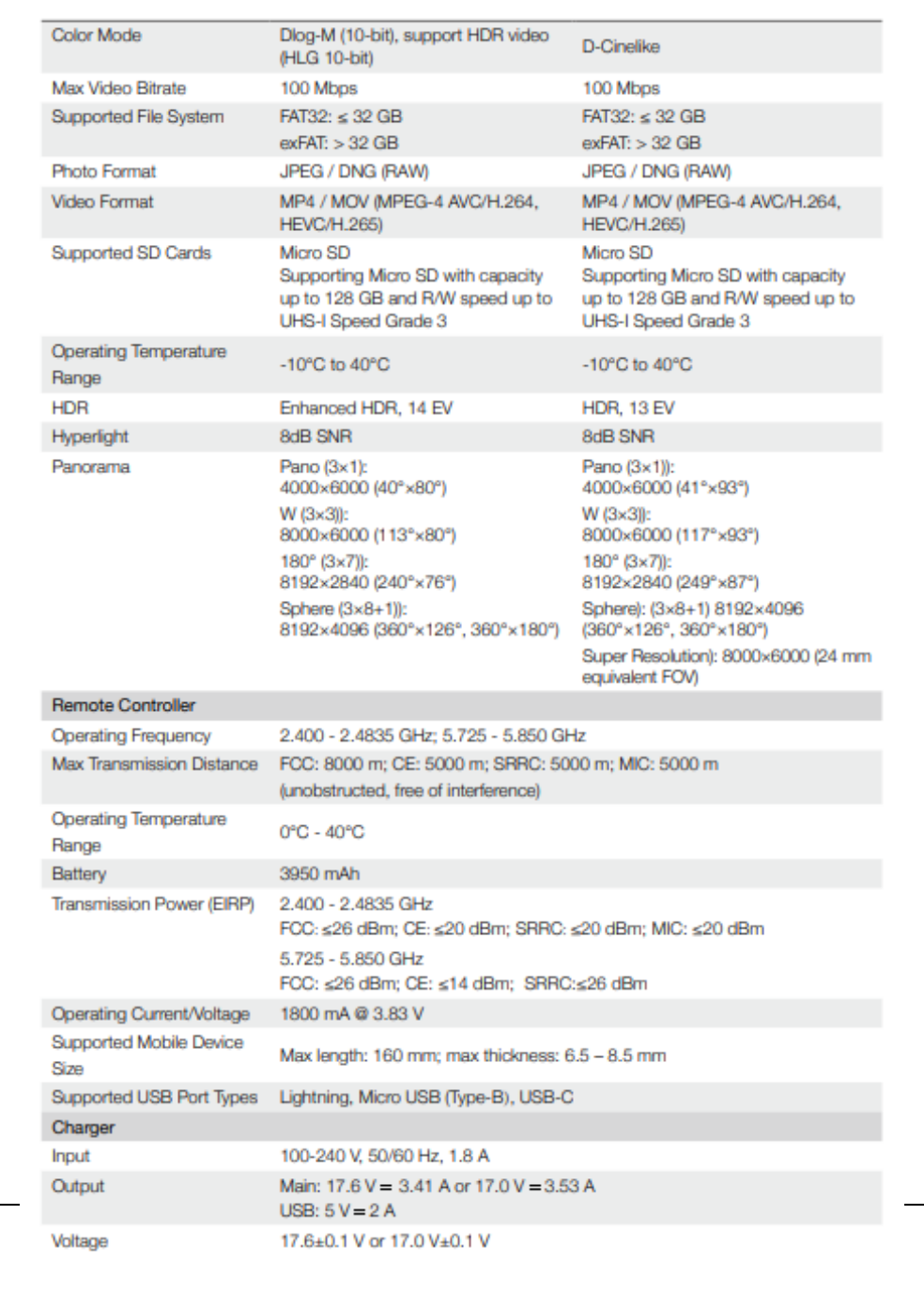
© University of Bristol 2023 Operations Manual V4.61
Page 68

© University of Bristol 2023 Operations Manual V4.61
Page 69
M2: DJI Mavic 2 Pro - Remote Controller LCD Screen Menu Information
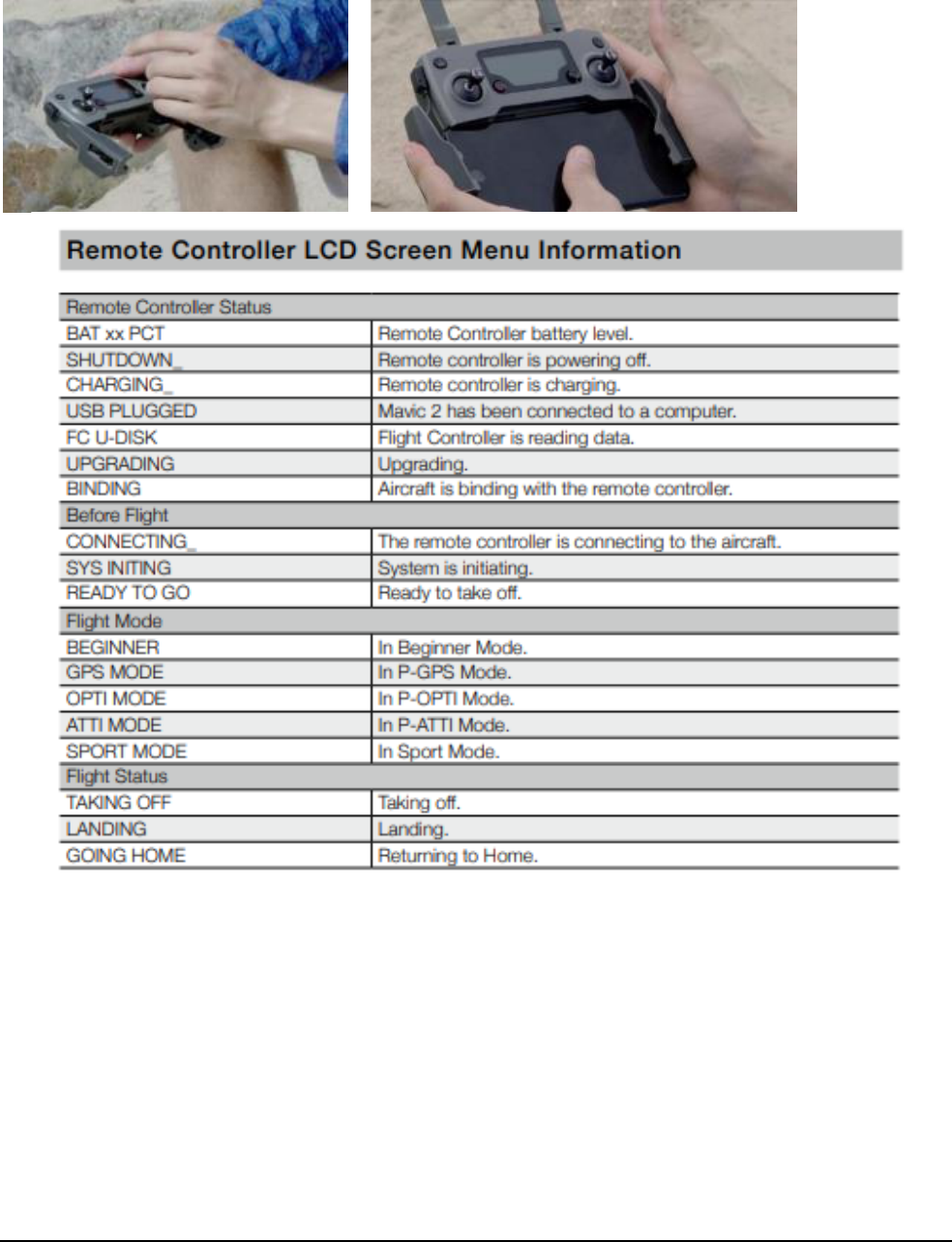
© University of Bristol 2023 Operations Manual V4.61
Page 70

© University of Bristol 2023 Operations Manual V4.61
Page 71

© University of Bristol 2023 Operations Manual V4.61
Page 72

© University of Bristol 2023 Operations Manual V4.61
Page 73
M3: Aircraft-Specific Maintenance details
Following the maintenance instructions of most DJI quadcopters, Remote Pilots must ensure that the aircraft
continues to offer optimal performance and to ensure flight safety. It is recommended that comprehensive
maintenance be performed after every 200 flights or 50 flight hours.
This manual is intended to help users maintain their aircraft and maximize its continued reliability.
Battery checks
Checked
Check battery for damage or deformities
Check battery connections are clean
Check Mavic internal power connectors are clean
Check battery casing
Check inside battery compartment for damage and debris
Check battery health using appropriate app
Airframe checks
Checked
Confirm all screws are adequately tightened
Check airframe for cracks or damage
Visually and gently tug check exposed wiring
Clean airframe if appropriate
Motor and propeller checks
Checked
Check motor screws are tight
Check for bearing movement (clicking when moving motor bell)
Remove propellers and run motors. Check there is no excessive vibration
Check motor bell for deformities
Check propellers for chips, stress lines and tip wear

© University of Bristol 2023 Operations Manual V4.61
Page 74
IMU check
Checked
Use the DJI Go App to check IMU calibration
Place the aircraft on a flat, stable surface and run advanced IMU calibration
Control and Video transmission system checks
Checked
Check antennae in landing gear are secure & free from bending or damage
Check transmitter antennae for damage
Check all sticks and switches are secure and functional
Clean transmitter if necessary
Camera and gimbal checks
Checked
Check rubber mounts and retainers
Check gimbal
Check for resistance to movement when unpowered
Confirm gimbal self-stabilises fully when powered
Ensure camera lens is clean and free from dust
Vision positioning system checks
Checked
Check and clean collision avoidance cameras
Check and clean IR collision sensors
Calibrate vision positioning system if required
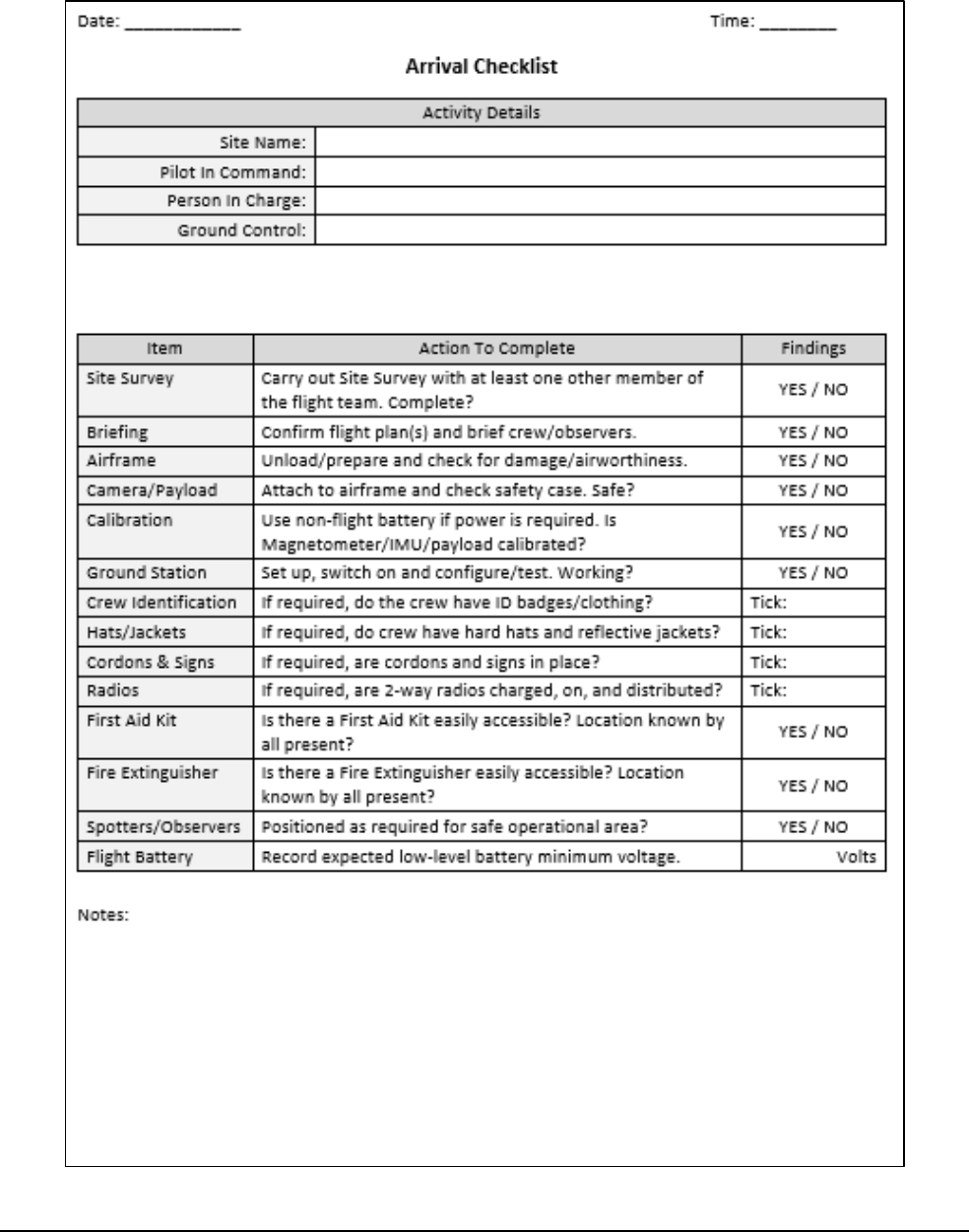
© University of Bristol 2023 Operations Manual V4.61
Page 75
7.2.2 Example Arrival Checklist

© University of Bristol 2023 Operations Manual V4.61
Page 76
7.2.3 Example Post-Arrival Site Survey

© University of Bristol 2023 Operations Manual V4.61
Page 77
7.2.4 Example Pre-Flight Checklist

© University of Bristol 2023 Operations Manual V4.61
Page 78
7.2.5 Example Logbook Entry

© University of Bristol 2023 Operations Manual V4.61
Page 79
7.2.6 Example Incident Report Form
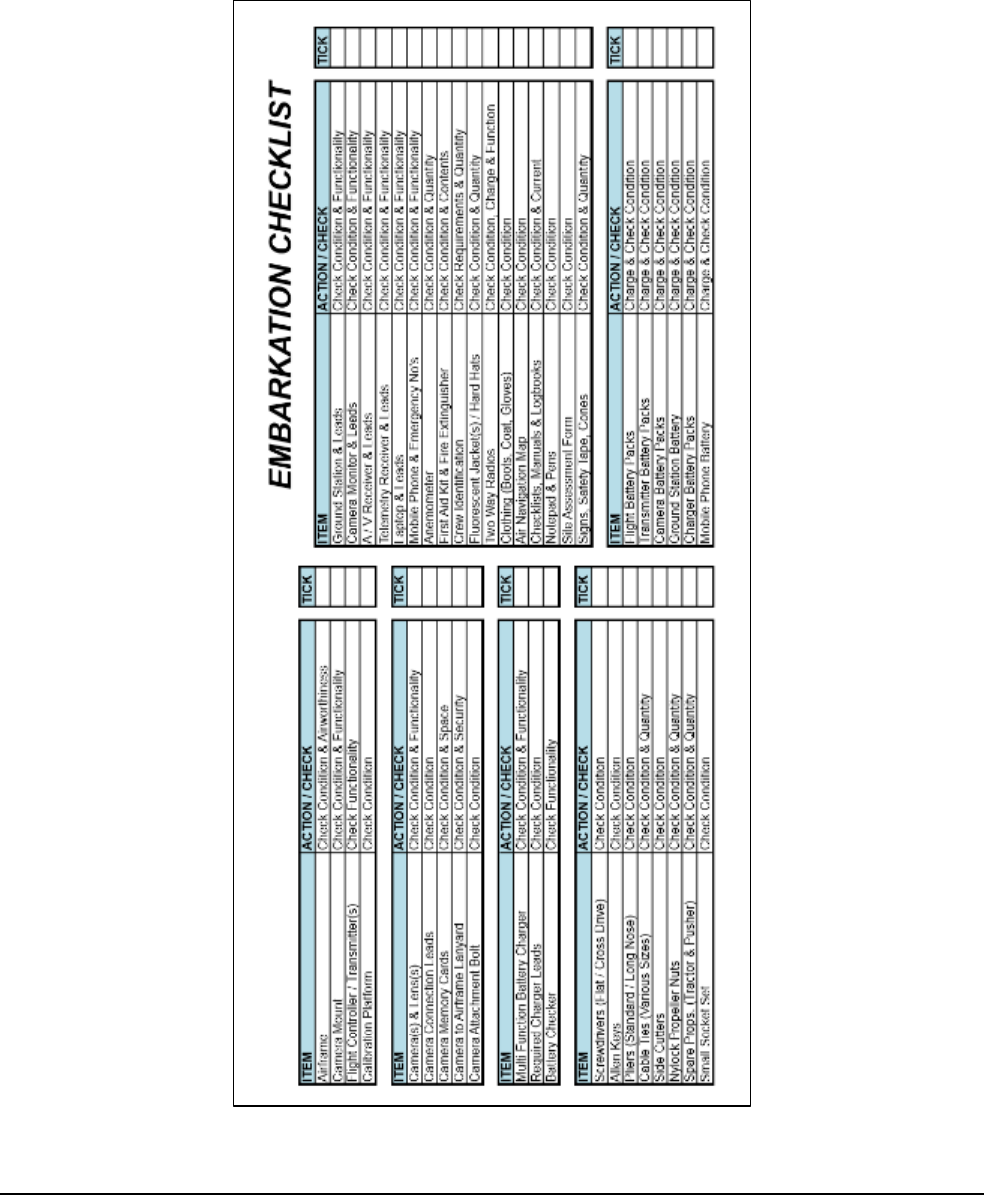
© University of Bristol 2023 Operations Manual V4.61
Page 80
7.3 Other Forms
7.3.1 Example Embarkation Checklist

© University of Bristol 2023 Operations Manual V4.61
Page 81
7.3.2 Example Post-Flight Checklist

© University of Bristol 2023 Operations Manual V4.61
Page 82
7.3.3 Example Maintenance Log

© University of Bristol 2023 Operations Manual V4.61
Page 83
7.4 Qualifications & Certificates
Duncan Hine
Thomas David
Hirad Goudarzi

© University of Bristol 2023 Operations Manual V4.61
Page 84
Yannick Verbelen
Ewan Woodbridge
Mickey Li

© University of Bristol 2023 Operations Manual V4.61
Page 85
7.5 University Aircraft Details
X-8 Octocopter
UAS Name
X-8 Octocopter
UoB Registration
BU-001
BU-002
BU-003
LUASS Registration
UAV2599
UAV1333
UAV2600
Type
Eight rotor multirotor, four arm coaxial motor configuration
Manufacturer
University of Bristol
Distributer
N/a
Airframe Model
Ascension X-8 Octocopter Mk1
Autopilot
Pixhawk by 3D Robotics
Wing/rotor span (m)
1.07
Length (m)
1.07
Manual control link details
Frsky L9R "Long range" 2.4Ghz 100mw
GCS link details
Ubiquiti 5Ghz
Video link details
Not installed by default
Fuel / battery details
22.2v, 6 cell Lithium Polymer, 8000-24000mAh
Number of engines
8
Engine(s)
T-Motor MN3515-15 400KV Brushless Motor
Airframe empty weight (kg)
4.5
MTOW (kg)
10

© University of Bristol 2023 Operations Manual V4.61
Page 86
UoB Heavy-Lift Octocopter
UAS Name
X-8 Octocopter
UoB Registration
BU-013
LUASS Registration
Pending
Type
Eight rotor multirotor, four arm coaxial motor configuration
Manufacturer
Foxtech
Distributer
Foxtech FPV
Airframe Model
X-8 Octocopter Mk2
Autopilot
Pixhawk by 3D Robotics
Wing/rotor span (m)
1.3
Length (m)
1.3
Manual control link details
Frsky X8R 433MHz 100mw
GCS link details
--
Video link details
Not installed by default
Fuel / battery details
22.2v, 6 cell Lithium Polymer, 8000-24000mAh
Number of engines
8
Engine(s)
T-Motor Brushless Motor
Airframe empty weight (kg)
7
MTOW (kg)
18

© University of Bristol 2023 Operations Manual V4.61
Page 87
7.6 Appendices
7.6.1 Letter of agreement – Bristol University & Bristol Airport (NATS)

© University of Bristol 2023 Operations Manual V4.61
Page 88

© University of Bristol 2023 Operations Manual V4.61
Page 89

© University of Bristol 2023 Operations Manual V4.61
Page 90

© University of Bristol 2023 Operations Manual V4.61
Page 91

© University of Bristol 2023 Operations Manual V4.61
Page 92

© University of Bristol 2023 Operations Manual V4.61
Page 93

© University of Bristol 2023 Operations Manual V4.61
Page 94

© University of Bristol 2023 Operations Manual V4.61
Page 95

© University of Bristol 2023 Operations Manual V4.61
Page 96

© University of Bristol 2023 Operations Manual V4.61
Page 97

© University of Bristol 2023 Operations Manual V4.61
Page 98
