
A conservation practitioner’s guide to the use of unmanned
aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges
and learning of a UAV-based approach
Funded by:
Prepared by:
Moors for the Future Partnership

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
2
Prepared by
Moors for the Future Partnership
The Moorland Centre, Edale, Hope Valley, Derbyshire, S33 7ZA, UK
W: www.moorsforthefuture.org.uk
Crouch, T. & Chandler, D. (2021) A conservation practitioner’s guide to the use of unmanned aerial
vehicles (UAVs) for peatland monitoring and conservation: an exploration of the successes, challenges
and learning of a UAV-based approach. Moors for the Future Partnership, Edale, UK.
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
3
Contents
1. Introduction ....................................................................................................................................... 6
2. UK airspace and regulations ........................................................................................................... 7
2.1. Regulations relating to the use of small unmanned aircraft ........................................... 7
2.2. Regulations relating to the commercial use of small unmanned aircraft prior to 31
December 2020 ..................................................................................................................................... 8
2.3. Regulations relating to the operation of drones in different countries ...................... 8
3. Remote pilot assessment process ................................................................................................. 9
3.1. Manufacturers training ............................................................................................................ 9
3.2. Flying practice & currency ..................................................................................................... 9
3.3. UAV insurance ....................................................................................................................... 10
3.4. Land owner permission ........................................................................................................ 11
3.5. SSSI consent ............................................................................................................................ 11
4. UAV Platform .................................................................................................................................. 11
5. UAV Sensors .................................................................................................................................... 12
6. Pre-flight Planning ........................................................................................................................... 13
6.1. Pre-deployment survey ........................................................................................................ 13
6.2. On-site survey ........................................................................................................................ 14
6.3. Flight operations .................................................................................................................... 14
7. Flight Records .................................................................................................................................. 15
8. Logistics ............................................................................................................................................ 15
9. Ground Control.............................................................................................................................. 16
9.1. GCP target design ................................................................................................................. 16
9.2. GCP number and distribution ............................................................................................ 17
10. Flying ............................................................................................................................................. 19
10.1. Pilot experience ..................................................................................................................... 19
10.2. Weather and local environment considerations ............................................................ 19
10.3. Damage and redundancy ...................................................................................................... 20
10.4. Launch and landing ................................................................................................................ 20
10.5. Other technical challenges .................................................................................................. 21
10.6. Wear and tear ........................................................................................................................ 23
11. Ground survey ............................................................................................................................ 24
11.1. Methodology ........................................................................................................................... 24
12. Data ............................................................................................................................................... 25
12.1. Data privacy ............................................................................................................................ 25
12.2. Data transfer, storage and backup ..................................................................................... 26
12.3. Data processing and analyses .............................................................................................. 27
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
4
12.4. UAV Data Quality ................................................................................................................. 28
12.4.1. Quantity and quality of field data ............................................................................ 29
12.4.2. Large area coverage and multiple sensors and flights ........................................ 29
13. Summary....................................................................................................................................... 30
14. References ................................................................................................................................... 31
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
5
List of Figures
Figure 9-1: Multisensor target design (Brooke & Clutterbuck, 2019) ............................................................................. 17
Figure 9-2: Distribution of GCPs for surveys on Eriophorum dominated sites ............................................................. 18
Figure 10-1: Last image taken prior to launch ....................................................................................................................... 22
Figure 10-2: First image captured over the survey area ..................................................................................................... 23
Figure 12-1: Secure data storage workflow ........................................................................................................................... 26
Figure 12-2: MFFP folder structure and naming protocol .................................................................................................. 27
List of Tables
Table 12-1: Total storage space required for a 70ha site flown with three different sensors ................................. 27
Table 13-1: Summary of main successes, challenges and lessons learnt ......................................................................... 30

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
6
1. Introduction
Unmanned Aerial Vehicles (UAVs), also known as drones, Remotely Piloted Aircraft Systems
(RPAS), Unmanned Aircraft Systems (UAS), Model Aircraft and Radio Controlled Aircraft, are
aircrafts without a human pilot on board.
Unmanned Aerial Vehicles are being used around the world by researchers and other
organisations for a range of conservation applications. One of the most common applications
for drones is mapping (Wich & Koh, 2018), which can take many forms, including 2D base
maps, 3D terrain models, habitat, land use, human activities, archaeology, disaster response
and precision agriculture. Other UAV applications include surveillance (e.g. terrestrial and
marine) and animal detection (e.g. behaviour, condition, density, distribution, migration, social
interaction).
Imagery derived from UAVs is also being applied in peatland environments, and may provide
unprecedented levels of detail for identifying target areas for restoration and enhancing
subsequent monitoring (Clutterbuck et al., 2018).
In 2016, with funding from the EU LIFE fund, Moors for the Future Partnership (MFFP)
purchased a UAV to capture earth observation data, with the aim of monitoring the impact
of peatland conservation actions at a landscape scale, alongside traditional field monitoring at
the site scale.
Moors for the Future Partnership has been working since 2003 to protect the most degraded
peatlands in Europe. Using innovative conservation techniques, over 35 square kilometres of
bare and degraded peat bogs across the Peak District and South Pennine Moors have been
transformed.
In 2016, MFFP had no prior experience of using UAVs. At this time there was a lot of literature
on the various applications of UAVs in environmental monitoring, which share the outcomes
of research projects, but very little information available on the practicalities and experiences
encountered when using UAVs (but see Cunliffe et al., 2017; Duffy et al., 2018).
The aim of this document is to provide a guide to the use of UAVs for conservation
practitioners, which is based upon MFFP’s experiences (successes, challenges and lessons
learned) of using UAVs for peatland monitoring and conservation. We hope that it will enable
other practitioners to make better informed decisions on the appropriate approach to take,
whether sufficient resources (budget and people) are available, and whether the chosen
approach will deliver the desired outputs. It covers a range of subjects from airspace and
regulations to UAV platforms and data storage. Most sections contain a ‘guide’ section and a
‘MFFP experiences’ section. It can be read from cover to cover but it can also be dipped into
as you would a text book if there are particular areas you want to find out about.
To the best of our knowledge the information provided is accurate at the time of writing.
However, it is particularly important to stay up-to-date with drone regulations, which have
been known to change frequently. This is best achieved via official websites such as Civil
Aviation Authority (caa.co.uk) and Introduction – Dronesafe.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
7
2. UK airspace and regulations
Airspace in the UK is managed and designated by three organisations: the UK Government
(largely the Department for Transport (DfT)); the Civil Aviation Authority (CAA); and NATS
Holdings (formerly National Air Traffic Services) (Butcher & Haylen, 2018).
The Government is responsible for overall aviation policy. The CAA is the aviation regulator
and is responsible for the planning and regulation of all UK airspace. Its overarching duty is to
maintain a high standard of safety in the provision of air traffic services. NATS Holdings is the
monopoly provider of en-route air traffic navigation services to aircraft flying in UK airspace
(Butcher & Haylen, 2018).
2.1. Regulations relating to the use of small unmanned aircraft
UAVs can cause injury or damage if they are not used responsibly. Consequently, they are
subject to specific regulations relating to the way they are operated, which are underpinned
by UK law. At the time of writing, these regulations are contained in Commission
Implementing Regulation (EU) 2019/947 ‘The UAS Implementing Regulation’ (CAA, 2015a). A
consolidated version of the UAS Implementing Regulation can be found in CAP 1789A (CAA,
2021a). These are mainly safety regulations but they also cover some matters relating to
privacy and security (CAA, 2015a). The Air Navigation Order 2016, as amended, also sets out
some requirements that apply to UAVs, and the most relevant ones are:
Article 240 – Endangering safety of an aircraft
Article 241 – Endangering safety of any person or property (CAA, 2015a)
From 30 November 2019, the requirement for a UAV operator (the person or organisation
that manages how a UAV is used) to be registered, and the remote pilot (the person
responsible for carrying out the flight safely) to demonstrate competence became mandatory
in law (CAA, 2020a). This means that most drones and model aircraft must be registered
before flying outdoors in the UK. There are three main requirements: 1) to pass an online
test to get a flyer ID; 2) to register for an operator ID; and 3) to label any drones and model
aircraft with the operator ID (CAA, 2021b). Registration allows drones and model aircraft to
be flown in the Open A1 and A3 sub-categories (basic, low-risk flying) (CAA, 2019a). There
are a basic set of regulations for flying unmanned aircraft within the UK (CAA, 2015b) – see
The Drone and Model Aircraft Code | UK Civil Aviation Authority (caa.co.uk). Operating
within these limits will ensure that you remain in the ‘Open Category’, meaning that
authorisation from the CAA to fly is not required (CAA, 2015b). Further authorisation, now
known as an ‘Operational Authorisation’, is required for more advanced flying, or to fly drones
or model aircraft weighing more than 25kg (CAA, 2019a). For further information on
Operational Authorisation for Specific and Certified category operations see Unmanned
aircraft and drones | UK Civil Aviation Authority (caa.co.uk).

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
8
2.2. Regulations relating to the commercial use of small unmanned
aircraft prior to 31 December 2020
Prior to 31 December 2020, there was a distinction between flying commercially
1
and flying
for pleasure or recreation. This distinction no longer exists; the rules are now based on risk
and weight of drone (CAA, 2020b). This section is included to provide context on the process
that MFFP went through to be able to operate commercially. It also provides some context
for the reader of the extent and frequency of ongoing changes within the operation of UAVs
in the UK, something which operators must keep up to date with, and adapt to.
Previously, permission had be obtained from the CAA before commencement of commercial
UAV operations. According to Cunliffe et al. (2017), even researchers who had long enjoyed
the freedom of operating separately from ‘hobbyists’ and ‘commercial’ operators were now
finding that their institutions were demanding evidence of operational competence.
To obtain CAA Permission for Commercial Operations (PfCO), a remote pilot was required
to demonstrate sufficient understanding of aviation theory, including airmanship, airspace,
aviation law and good flying practice; pass a practical flight assessment; and develop protocols
for safe drone deployment, alongside maintenance and flight records (Cunliffe et al., 2017)
and set these out in an Operations Manual (OM). Cunliffe et al. (2017) share their OM as
supplemental material to an article “A UK Civil Aviation Authority (CAA)-approved
operations manual for safe deployment of lightweight drones in research”. However, there
have been amendments to the Air Navigation Order (ANO) since 2017 and applications may
be rejected if they do not reflect the latest amendments to the ANO. This emphasises the
importance of staying up-to-date with drone regulations and it is suggested that this is best
achieved via official websites such as Civil Aviation Authority (caa.co.uk) and Introduction –
Dronesafe.
MFFP were required to provide evidence of operational competence, including CAA PfCO,
before being granted permission to fly on land owned by other conservation organisations
and utility companies. In all cases these other organisations are partners within MFFP and
directly involved in the project for which the data was being collected.
2.3. Regulations relating to the operation of drones in different
countries
Civilian airspace in many countries of the world is regulated by National Aviation Authorities
(NAAs). Regulation for the operation of drones differs between countries and it is important
that operators always consult these before operating and where needed apply for the
necessary permits (Wich & Koh, 2019).
While no complete database of UAV regulations exists, the Global Drone Regulations
Database (| Global Drone Regulations Database) is a good starting point. This database
provides a country directory with summaries of national UAV laws.
1
Commercial operations are defined by the CAA as “… any flight by a small unmanned aircraft… in return for
remuneration or other valuable consideration” (ANO, 2016), i.e. using a UAV for payment in any way.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
9
3. Remote pilot assessment process
The CAA does not organise or run assessment courses; instead they approve commercial
organisations, known as Recognised Assessment Entities (RAE) (formerly National Qualified
Entities (NQEs)), to do this assessment on their behalf. Proof of remote pilot competence
from an RAE is required before applying for Operational Authorisation (formerly PfCO)
(CAA, 2015c).
MFFP staff attended a NQE full-course which involved 3 days of classroom lessons and
exercises; a written theory test; and a flight assessment (arranged for a later date). After
successfully completing the theory test, we developed an operations manual, attended
manufacturers training (see section 3.1) and practiced aircraft operations and flying skills
before taking the practical flight assessment. Guidance with developing an OM was provided
as part of the course. The flight assessment tests the applicant’s aircraft operation, flying
skills and the procedures described within the applicant’s OM (CAA, 2015c). It is worth
checking that the NQE you choose has experience of flying the type of aircraft you will be
assessed on. The MFFP aircraft requires a large area for take-off and landing, e.g. 350 m for
a belly landing. MFFP staff attended practical assessments at two different sites; both sites
were too small to perform a belly landing, as well as making other aspects of the assessment
more difficult. They were not sites we would have surveyed using that particular aircraft.
3.1. Manufacturers training
Depending on the complexity of the UAV chosen and the level of experience within the team,
it may be necessary, or at least beneficial to attend a training course with the manufacturer
of the UAV.
No one within the MFFP team had previous experience of flying UAVs before the start of
the project. After purchasing the UAV, four members of the team attended a five-day
manufacturers training course. We were trained in teams of two, in which one team
member was the pilot and the other the commander. We were required to remain in these
roles for the duration of the training. Following the manufacturers training, the ‘pilots’
cross-trained the ‘commanders’ in the pilot role and vice-versa. The training covered a wide
variety of skills required to fly a UAV, for example, principles of flight, equipment, assembly
of equipment, flight planning, pre-mission UAV checks, camera set-up, launching (all team
members), flying (pilot only), landing (pilot only), flight debrief etc. During the training we
experienced strong winds and consequently spent more time in the classroom than outside.
Over the five-days, one pilot performed three flights, totalling 1 hour 15 minutes and the
other pilot performed two flights, totalling 1 hour. Both pilots practiced one belly landing
and one parachute landing.
3.2. Flying practice & currency
When MFFP applied for PfCO, remote pilots were expected to have logged at least 2 hours
total flight time within the last 3 calendar months on the type of UAV applicable to the
operational authorisation. This flight time had to be undertaken during ‘live flight’ and not on
any form of UAV simulator (CAA, 2019b).

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
10
Following manufacturer’s training, MFFP carried out in-house practice and training until we
were sufficiently confident to take the practical assessment. Following the practical
assessment the pilot was required to have completed a minimum of 2 hours of UAV flight
time within the 3 months preceding the PfCO application and provide logbook evidence as
proof.
The whole process leading to formal CAA PfCO certification took approximately 8 months
to complete. This is relatively consistent with Cunliffe et al. (2017) for whom the process
took 1 year.
This currency was also reflected in the operations manual. The minimum levels of currency
defined by MFFP in our 2018 operations manual were:
Manufacturer’s training
NQE full-course, including practical assessment
40 minutes of flying to include assisted
2
mode per month
2 hours of flying to include assisted mode per quarter.
In the event that circumstances prevented pilots from maintaining minimum levels of
currency, the monthly and quarterly minimum currency requirements had to be completed
to a satisfactory level before recommencing commercial operations.
One of the difficulties we experienced was in finding a training site that was large enough
and where we could obtain landowner permission. We were unable to practice on the sites
that we would be flying in the future because we were in training and those landowners
were only able to give permission once CAA permission was obtained. We ended up with
two training sites; one was approximately 50 miles away and the other was a gliding club.
The gliding club agreed to allow us to fly on days where the cloud base was too low for
gliding but may have been suitable for UAV flights but these conditions never occurred and
consequently we never trained at this site.
3.3. UAV insurance
If you are operating an unmanned aircraft for anything other than fun, recreation, sport or as
a hobby you must have insurance cover for the aircraft that meets EC Regulation No.
785/2004 (CAA, 2015d). There are now a number of companies offering commercial UAV
insurance so it is worth shopping around.
In the experience of MFFP, there were no companies willing to provide insurance before
we had successfully completed our theory test, and few companies willing to provide
insurance whilst we were ‘in training’, i.e. before we applied for our PfCO. It is also worth
checking what level of public liability insurance different landowners require. In our
experience this has ranged from £2–10 million.
2
In assisted mode the autopilot provides a smoothed flight that also prevents the pilot exceeding a set amount
of bank (roll) or pitch (elevation). The pilot has full control over throttle.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
11
3.4. Landowner permission
Landowner permission must be obtained for the take-off and landing site that is being used;
this was also a requirement contained within our PfCO. However, best practice, is that
landowner and tenant permission should also be obtained for any land that will be covered by
the flight.
In 2017, MFFP were not granted tenant permission to fly over certain land holdings until
the autumn. By autumn the light levels and weather had deteriorated and we were unable
to survey all of the required sites. In 2018, permission was granted on all sites, although the
process required and time taken to obtain permission varied considerably depending on
the landowner. In 2019, MFFP decided to return to ‘traditional’ aerial photography from
manned aircraft (see section 12.4.2 for further details). One of the justifications for this was
that aerial photography removes risks to image-capture associated with site access
restrictions, increasing the likelihood of finding ‘windows’ of good weather for flying
(Clutterbuck et al., 2019). However, the summer of 2019 was generally wet, with just a few
more settled periods. Furthermore, due to the proximity of the sites to Manchester airport,
the contractor was often denied access by air traffic control. Ultimately, access was granted
but at a higher altitude resulting in lower resolution data than originally anticipated. In
addition, this flight did not take place until October resulting in shadow across the image.
This caused issues with the classification as shadow was confused with other dark land
cover classes; therefore reducing the overall accuracy of the classified map.
3.5. SSSI consent
In addition to landowner permission, Natural England’s (NE) SSSI permission (consent) is
required if the land to be covered by the flight is a Site of Special Scientific Interest (SSSI). The
request for permission (Notice of Proposal) should be submitted by the landowner/ occupier
(NE, 2020).
4. UAV Platform
There are three common types of UAVs used in conservation: multirotor, fixed-wing and
hybrid VTOL (vertical take-off and landing). A multirotor relies on one or more rotors that
generate the lift required for flight. A multirotor is able to move forwards, backwards, left
and right by adjusting the relative speeds at which its rotors are spinning (Wich & Koh, 2018).
A fixed-wing looks and functions like a manned aircraft. It has one or two horizontal propellers
that generate thrust to move the UAV forwards. Lift is generated by the movement of air
over and under the wings, which allows the UAV to take off and maintain straight and level
flight. The direction of flight is changed by the movement of its control surfaces, i.e. ailerons
and elevators (Wich & Koh, 2018).
A hybrid VTOL combines the features of the multirotor and fixed-wing aircraft. The most
important Pros and Cons of each are related to launch locations, payload, flight time and pilot
experience (Wich & Koh, 2018).

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
12
Once a decision has been made regarding the type of platform, it is also important to consider
the complexity of the system. For example, how easy it is to set up, launch, fly and maintain;
this varies considerably, even between platforms of the same type. Similarly, consideration
should be given to the software the UAV is supplied with, how easy it is to use and whether
it is able to do what you need it to do.
If you are purchasing a UAV, it makes sense to purchase something that is easily maintained,
has a strong user community, and works well as an integrated system (Calvo, 2016–17).
MFFP purchased a 5 kg modular fixed-wing aircraft with swappable sensor pods which
permits a greater range of sensors to be supported. It was supplied with high-resolution
sensors and is able to capture RGB and multispectral imagery simultaneously. It also has
high wind resistance, is weatherproof, has high endurance, and has three landing modes,
including a parachute (useful for landing on uneven ground). The manufacturers of the
aircraft are UK based, making access to technical support easier.
The flight software used by MFFP did not allow the UAV to follow the terrain (i.e. through
the use of a digital elevation model). This would have been a useful feature, given the
environment in which MFFP work.
5. UAV Sensors
An important consideration when using UAVs to collect data is to determine whether the
system will need one sensor or multiple sensors during the same flight, or whether data with
multiple sensors can be collected over multiple flights. According to Wich & Koh (2018), the
latter is likely to be an option when flights are conducted for land-cover classification because
the objects of interest are motionless.
The MFFP UAV was supplied with a Sony A6000 DSLR camera for visible spectrum (RGB)
images and a MicaSense RedEdge multispectral camera for multispectral images. The Sony
A6000 has a ground resolution of 2.4 cm per pixel at 120 meters above ground level. Image
formats include JPEG or RAW. The MicaSense RedEdge has 5 wavelength bands including
Blue, Green, Red, Red Edge, and Near Infra-Red. Monochrome ground resolution is 8.2 cm
per pixel at 120 meters above ground level. Image formats include RAW, 12 bit DNG or
16 bit TIFF.
As discussed above, one of the reasons the MFFP UAV was purchased was because it could
capture RGB and multispectral imagery simultaneously. However, due to issues with this
platform (discussed further in Sections 10.1, 10.3, 10.4, 10.5 and 10.6), an alternate solution
using sensors mounted on a senseFly eBee platform was subsequently adopted.
The eBee can be flown independently with either a S.O.D.A. (Sensor Optimised for Drone
Applications) or ‘Parrot Sequoia’ to collect RGB and 4-band (G, R, RE, NIR) imagery
respectively. This approach requires two flights rather than one to capture both sets of
imagery and must be flown lower (at approximately 60–70 m above the ground) to achieve
comparable spatial resolution. This approach increases the number of flight lines required
to capture the area and therefore increases image capture time (Clutterbuck et al., 2019).
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
13
In contrast to Wich and Koh (2018), we found that collecting data with multiple sensors
over multiple flights did present a number of issues (see section 12.4.2).
6. Pre-flight Planning
The safety and success of a UAV flight is, to a large extent, dependent on thorough pre-flight
planning. The following section details the pre-flight planning procedure implemented by
MFFP.
6.1. Pre-deployment survey
A pre-deployment survey is a desk-based activity to collate and record information relevant
to a flight on a specific site. It also ensures that all pre-flight planning activities are carried out
and that all flights are carried out safely and legally.
There are a number of planning aids that can be used to assist in completing the pre-
deployment survey including: Ordnance Survey maps; Aviation charts 1:250,000; Google
Earth; Sky Demon Light (http://www.skydemonlight.com/ – a free basic flight planning tool);
Altitude Angels (https://www.altitudeangel.com/solutions/drone-safety-map/) – online drone
safety maps; No fly drones (www.noflydrones.co.uk) – a free tool showing no fly zones in the
UK); NATS AIS (http://www.nats-uk.ead-it.com/public/index.php.html – providing an
Aeronautical Information Service); Drone Assist app – a drone safety app from NATS;
NOTAM
3
(Notices to Airmen) Info (https://notaminfo.com/ – providing up-to-date NOTAMS
plotted on a map); various online resources for checking weather (see section 10.2).
MFFP record this information on a pre-deployment survey form.
The pre-deployment survey form includes information on the following:
Section 1: Job details
Date; name of pilot, commander and observer; brief description of the aim of the
flight
Section 2: Site details
Landowner and tenant name, contact details and permission; coordinates; altitude;
address (or nearest address); whether there is vehicular access; nearest hospital and
telephone number for nearest hospital and police
Section 3a: Airspace
Controlled or uncontrolled; classification; ATC permission required; controlled
airspace within 40km
Section 3b: Airports within 40km
Airport, contact number, whether permission is required.
Section 3c: Airspace hazards
Danger, restricted and prohibited areas; other air spaces, users and hazards.
Section 4: Ground assessment (in relation to the potential risk and proposed mitigation)
3
NOTAMs are official notices that tell people about activities that may be a hazard to flying (CAA, 2019a).

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
14
Congested areas, isolated structures, conservation areas (including local bye-laws),
third-party infringement, roads and right of ways, livestock, recreational places and
any other restrictions.
Section 5: Weather (to be checked 24 hours prior to deployment)
Wind speed and direction; temperature; humidity; sunrise/ sunset; and general
forecast.
Section 6: Notes, flight plans and comments
Section 7: Approval to operate
Confirmation that, on the basis of the flight planning assessment, you believe
that the flight can be conducted safely, in accordance the required regulations.
6.2. On-site survey
In addition to the pre-deployment survey, an on-site survey should be carried out on arrival
at site, and prior to flying. The on-site survey provides an assessment of potential risks that
may not have been identified during the pre-deployment survey, i.e. weather and line of sight,
aiding decision making about where and when it is safe to fly.
The on-site survey form includes information on the following: weather; permission; air traffic
control; communications; buildings; people; take-off and landing area; obstructions; line of
sight; animals/ livestock. It also includes a dynamic risk assessment, with space to record
potential risks and mitigation.
MFFP record this information on an on-site survey form.
6.3. Flight operations
Having a working document such as an OM (see section 2.2) will allow for consistent and safe
flight operations, as well as reassuring collaborators and land owners that flight operations
are being conducted in a professional manner (Cunliffe et al., 2017). Flight operations, as
defined in an OM, will be specific to each organisation and to the drone being flown.
At MFFP we follow assembly and pre-flight checks which are specific to our aircraft. These
checks are about preparing the UAV for take-off and flight, as well as ensuring propeller
safety protocols are adhered to. If the UAV fails any of the checks then the UAV is not
flown until the issue is resolved.
Prior to take-off, the pilot in command provides a pre-flight briefing. This briefing details
who is performing what task and the route the aircraft will take. During the flight it is
important to know where the aircraft is on its route and what the next expected behaviour
will be. The commander relays information from the ground-control station software to
the pilot, while the pilot maintains visual contact with the aircraft. Where possible spotters
are also used, the spotter is responsible for assisting the pilot in the duties associated with
collision avoidance and informing the pilot of any notable sightings or sounds; ensuring the
pilot is not disturbed by the public; ensuring that prior to landing the landing area is clear
of people and animals and indicating this to the pilot; clearly pointing to the location in
which the UAV landed and continuing to point until the UAV is retrieved.
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
15
7. Flight Records
It is strongly recommended that comprehensive flight logs are maintained of both deployment
and experience. Flight logs contribute towards safety; these records can prove invaluable
when presenting a safety case to institutions, regulators, collaborators and landowners (Duffy
et al. 2017). Accurate record keeping and planning provides a means of better understanding
performance in the air, and monitoring and analysing flights, platforms and batteries. Making
notes of how you felt during a particular flight, for example, in windy conditions, will help you
better understand yourself as a pilot and increase your confidence and safety (Calvo, 2016–
17).
MFFP complete and retain the following flight record documents after each flight:
1) Pre-deployment survey (see section 6.1)
2) Request for NOTAM Action
3) NOTAMs
4) On-site survey form (see section 6.2)
5) Battery register form
6) UAV flight log
7) UAV flight report form
8) Record of flying time
9) UAV flight and issues log
10) UAV follow-up actions
11) UAV modification record
8. Logistics
Calvo (2016–17) recommends that when working in remote locations, the drone and all
supporting equipment for a full day of field operations should be able to be carried easily by
a single person through rough terrain. Unless you have a means of charging batteries on site
you will also need to ensure that you have sufficient batteries for drones, cameras, ground
station (laptop or tablet), GPS and any other electronics you require.
The MFFP UAV is not easily carried by a single person, and while Calvo (2016–17) may be
referring to significantly more remote locations than the top of Kinder Scout in the Peak
District, it is nevertheless important to consider how you will transport your equipment to
site and how many people will be required.
To reach MFFP’s sites on Kinder Scout takes approximately 1.5 hours by foot. The UAV
and all ancillary equipment can be packed into two 35L and two 50L rucksacks. A keyboard
bag was used to carry the wings. This required at least five people to transport the
equipment onto site, bearing in mind that everyone still needs to be able to carry sufficient
food, water and clothing for a potentially long day on the hill.
In our case, the number of people required to transport equipment to field sites is
acceptable because that number of people can easily be used once on site to set out ground-
control point (GCP) targets and mark locations with a Differential Global Navigation

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
16
Satellite System (DGNSS), unpack equipment, set up the launch line, assemble the UAV and
carry out pre-flight checks, pilot, command and act as observers during the flight.
The MFFP UAV has a lot of ancillary equipment; therefore, equipment checklists are used
to pack bags at base but are also taken to the field to ensure that all the equipment is
checked back in at the end of the day.
9. Ground Control
One of the challenges with most forms of UAV acquired data is relatively poor spatial accuracy
(Duffy et al., 2018). Depending on the intended use of the data, this may or may not be a
problem.
MFFP started collecting UAV data to monitor land cover change between years, including
increases in the extent of Sphagnum moss. As Sphagnum has been shown to grow at rates
of less than 50mm per year (Küttim et al., 2019), very high spatial accuracy is required in
order to identify these small-scale changes. The spatial accuracy of the MicaSense
RedEdge™, used by MFFP, is at best 2–3 metres (MicaSense, 2015). In order to process
the UAV-derived imagery with the accuracy required a number of ground-control point
(GCP) targets were positioned on the ground for each survey (Clutterbuck & Yallop, 2017).
The location of the GCPs were marked using a DGNSS. MFFP use the Trimble Geo 7X,
which, besides being very user friendly, can achieve positional accuracy of c. 2–3 cm, once
the data has been post-processed.
9.1. GCP target design
When used, ground-control point (GCP) targets should be designed in accordance with (i)
the spatial resolution (i.e. being at least 6–8 pixels in diameter) (James et al. 2017, cited in
Duffy et al. 2017) and (ii) the electromagnetic sensitivity of the sensor (i.e. identifiable in all
spectral bands, particularly when working with non-visible spectrum data) (Duffy et al. 2018).
A range of GCP target designs were extensively explored with data captured using both
the SONY A6000 and MicaSense RedEdge in the same flight. The most successful design
(i.e. visible in both sets of imagery) is shown in Figure 9-1 (Brooke & Clutterbuck, 2019).
The GCP targets comprise a double-cross pattern with a large black square and smaller
white square in the centre. They are constructed from black and white corrugated
polypropylene sheets (2mm thick) (Clutterbuck & Yallop, 2017; Brooke & Clutterbuck,
2019) to ensure they are sufficiently lightweight and easy to transport on to site. The white
square is attached to the top of a peg. The peg is pushed through pre-cut holes in the black
square and cross and secured into the ground to prevent the target blowing away. On
occasions, wind caused the white cross to blow up, covering the white square and some of
the black square. This was resolved by using wooden skewers to hold the cross down.
This target was discovered to be less visible in the thermal data. Brooke & Clutterbuck
(2019), tested a cross target made from aluminium foil, with the same dimensions as the

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
17
larger black cross used in the multisensor target, and found it to be more easily identifiable
in thermal imagery than black polypropylene.
Figure 9-1: Multisensor target design (Brooke & Clutterbuck, 2019)
9.2. GCP number and distribution
For relatively small surveys covering 20–30 ha, GCPs distributed on a 100 m triangular grid
provide excellent results and provide redundancy in case one or more GCPs move during the
flight or are not visible for some reason in the data collected (and would therefore be
excluded from image processing). For larger surveys, GCPs distributed on a 150 m triangular
grid have to date found equally good results (Clutterbuck & Yallop, 2017). The location of the
GCPs can be marked using a DGNSS.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
18
Each survey carried out by MFFP covered c. 50 ha. For each survey the main area of interest
(AOI) was a c. 1 ha ‘field laboratory’ located in the centre of the 50 ha survey. The time
required to set out and record the location of GCP targets on a 100 m triangular grid using
DGNSS equipment was unfeasible in the time available. As the field laboratories and
associated catchments were the most important part of the survey area, GCPs were
distributed on a 100 m triangular grid within and directly around the catchment and on a
150 m triangular grid for the remainder of the survey area (totalling c. 29 GCPs per flight
area; see Figure 9-2). To make the most effective use of the ground survey team’s time,
GCPs locations were loaded directly onto Garmin units, the GCPs were numbered to help
the teams set targets out without missing any, and printed copies of the GCP map were
provided to all members of the flight crew and ground survey team.
Appropriate target design, highly accurate GCP coordinates and well-distributed GCPs on
each survey site enabled Pix4D to process the imagery and report consistently low mean
error. For RGB data (from the S.O.D.A. camera), the mean overall RMSE (in x, y and z)
was consistently comparable to and often lower than the pixel size and for the multispectral
data (from the Sequoia), the mean overall RMSE was less than half the pixel size
(Clutterbuck et al., 2019).
Figure 9-2: Distribution of GCPs for surveys on Eriophorum dominated sites

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
19
10. Flying
10.1. Pilot experience
Another important consideration when choosing an aircraft type is the level of experience
within the team. A multirotor can be flown with minimal or no training and experience, while
a fixed-wing requires experience and training to effectively pilot, especially for take-off and
landing (see section 3.1). A hybrid VTOL sits somewhere in the middle, requiring an
intermediate level of pilot experience (Wich & Koh, 2018).
MFFP have experienced some issues due to limited pilot experience, including:
Motor burn out caused by the throttle not being fully off following a landing.
UAV launched in wrong mode, resulting in a failed launch.
UAV stalled and crashed due to low speed.
Displaced autopilot, not identified in pre-flight checks caused two further stalls.
According to Calvo (2016–17), ”if you are a researcher who wants to start using drones as
part of your projects, working together with a specialist might save thousands of dollars in
crashed platforms and hundreds of hours in attempts”, indicating that this is not just the
experience of MFFP.
10.2. Weather and local environment considerations
Detailed weather forecasts should be checked the day before and on the morning of the flight,
and if necessary, the flight should be postponed.
There are a number of useful on-line resources for checking the weather, such as the Met
Office (www.metoffice.gov.uk), Metcheck (www.metcheck.co.uk) and xc weather
(http://xcweather.co.uk/). UAV Forecast (https://www.uavforecast.com/) shows 24 hours of
hourly forecast for free and includes information on gusts, temperature, precipitation
probability, cloud cover, visibility, visible satellites and an indication of whether it is good to
fly or not.
In addition to checking weather forecasts, it is always necessary to check weather conditions
on arrival at the site. This is particularly important for wind speed and direction.
Duffy et al. (2017), suggest carrying a handheld anemometer to check that wind conditions
are within the operational range of your UAV, for example, a maximum launch wind speed of
20 Knots (23 mph) is recommended for the MFFP UAV. Generally, wind speed increases with
height; therefore, it is useful to get the anemometer as high as possible, for example, MFFP
generally attach an anemometer to the end of a 6 ft. garden cane. It is also informative to
observe the movement of trees and clouds. MFFP have had a number of flights in which we
have launched but the UAV has struggled against the wind and some cases we have landed
because it has been too windy.
A wind sock will also give an indication of wind speed, as well as wind direction. Some UAVs
need to be launched and landed into the wind and if you are flying a pre-programmed route

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
20
it may be necessary, or at least beneficial (i.e. greater endurance), to orientate the survey grid
according to the wind direction. For example, if flying the MFFP UAV in an easterly wind, the
flight lines would be orientated in a north-south pattern, with the first flight line located to
the west of the survey area, allowing the UAV to turn into the wind at the end of each flight
line.
According to The Drone and Model Aircraft Code, a UAV should not be flown within 50
metres of people, including people in buildings and transport, which is not under the control
of the SUA operator or the remote pilot of the aircraft (CAA, 2021c). For MFFP, this has
meant that certain sites could not be flown in certain wind directions, because launching into
the wind would take the aircraft over nearby roads.
It is also important to know the operational range of your UAV in relation to other weather
parameters such as rain and temperature. The MFFP UAV is weatherproof and able to operate
in temperatures of -10°C to +40°C. However, just because it is possible to fly does not mean
that the data collected, e.g. during rain, would be of a suitable quality, or that the pilot would
function well.
It is also important to be aware of the effect of weather on battery life. In both windy and
cold conditions flight time may be reduced due to shorter battery life.
10.3. Damage and redundancy
One consideration when deploying UAVs, particularly in remote locations, is contingency and
redundancy in all aspects of the system, i.e. ground-control station (GCS), UAV, etc. The
specific spares you carry will be related to your particular aircraft but as a minimum, Duffy et
al. (2017), advise UAV operators to carry multiple replacement batteries (UAV and
controllers), a battery checker, replacement propellers, a basic toolkit, electrical tape and
cable ties.
MFFP works on a variety of moorland sites which are accessed by foot, taking between 15
minutes and 1.5 hours. It is so important that all of the necessary equipment is taken to
site. If one small item is forgotten it may mean that the whole day is wasted. To ensure this
does not happen it is a good idea to use equipment checklists. The MFFP UAV and all the
associated equipment has to be packed into a number of bags and we have an equipment
checklist for each bag. We also take a copy of the checklists to site to ensure that all of the
equipment is returned to base at the end of the day.
On the MFFP UAV, the camera hatch regularly detaches during a belly landing; therefore,
we always carry additional camera hatches with us. Other spares that we carry include
batteries (camera, DGNSS, laptop and UAV), electrical and glass weave tape (for minor
repairs), cam locks (for attaching the wings to the aircraft body), propellers, and a small
toolbox containing screwdrivers, nuts and washers, scalpels and a wrench.
10.4. Launch and landing
One consideration when choosing an aircraft type is the likely launch and landing locations.
Both multirotor and hybrid VTOL drones can take off and land in a small area and can be

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
21
launched in a wide range of environmental conditions. In contrast, fixed-wing drones often
require a larger, more open and flat area for launch and landing (Wich & Koh, 2018).
For example, the MFFP UAV, which is launched using a Safe Launch Bungee System, requires
an area of approximately 300 m by 150 m for take-off, which is unbounded by high trees or
obstacles. For landing, 350 m is required for the aircraft to glide down a horizontal flight
path over which the flight altitude gradually decreases (Wich & Koh, 2018). The orientation
of this area will also depend on the wind direction, with launch and landing performed into
the wind. This means that some sites, where space is more limited, can only be surveyed in
certain wind directions.
The Safe Launch Bungee System was developed to get a relatively heavy aircraft airborne
without an undercarriage or runway. The UAV has a top and bottom harness that allows
considerable forces from the launch line to be transferred without stress through the body
of the aircraft to the hand of the launcher. On release, the launching forces acceleration of
the aircraft gently, but swiftly, to flying speed.
MFFP has, however, had a number of issues with the Safe Launch Bungee System, including:
The air-trigger barb (which attaches the air trigger to the UAV) sheared off when
the launch line was under full tension causing an early release.
The UAV failed to detach from the air trigger during a launch, causing the aircraft
to be pulled back to the ground and crash.
The air trigger and barb bent when the launch line was under full tension, causing
an early release.
The launch line was sucked into the prop on a launch. The air trigger chipped the
ends off the prop, causing the UAV to nosedive and crash land. On this occasion,
we think the crash was actually caused by a displaced autopilot, rather than the
launch line per se.
During the first launch with a new air trigger the UAV released early and looped
back towards the launcher.
Due to the number of incidents with the launch line and health and safety concerns over
the potential injury that could be caused by a launch line incident a decision was made to
temporarily stop flying with the MFFP UAV until a solution could be found.
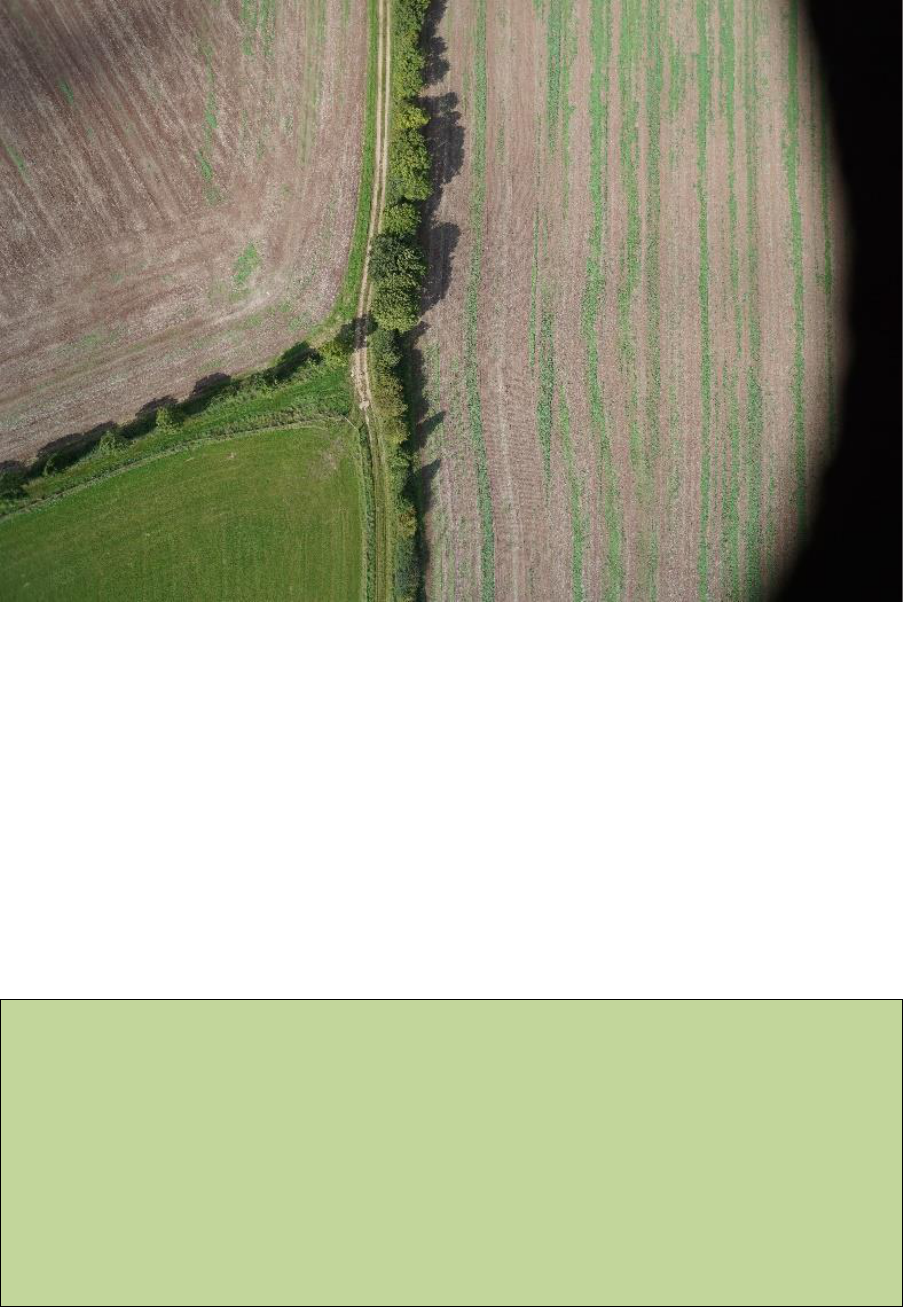
10.5. Other technical challenges
MFFP has also experienced a number of other technical challenges, relating to sensors,
software and the UAV platform itself. With regards to sensors, movement of cameras
during launch has impacted on image quality. In the example below the two images are
sequential. Figure 10-1 was the last image taken prior to launch. Figure 10-1Figure 10-2 is
the first image captured over the survey area. Here the SONY camera shifted from its
optimal position in the UAV after being set up and the aircraft frame obscures one edge of
the image. These will not be suitable for image processing. On occasions we also carried
out flights in which the MicaSense RedEdge did not capture images. In both cases, the flight
had to be repeated.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
22
The flight software generally functioned well; however, on one occasion (during a practical
assessment), an error occurred with the flight software which prevented the flight from
taking place. We were told by the software provider that the error occurred because too
many waypoints were added to the flight plan. This theory was tested by MFFP, by creating
plans and sequentially adding more waypoints but we were unable to recreate the error.
The reason for this error was never established.
With regards to the platform itself, for a period of time we suffered from poor and
intermittent radio signal between the ground station and the UAV. This issue persisted for
some time before it was noticed that the pin in the co-axial connection was not protruding
sufficiently.
Figure 10-1: Last image taken prior to launch
A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
23
Figure 10-2: First image captured over the survey area
10.6. Wear and tear
In addition to the various issues described above, there are also issues that occur as a result
of wear and tear and genuine accidents. The ideal scenario would be to operate with full
redundancy, i.e. have a second UAV which operates in parallel with the primary UAV so that
both are sharing the demand. Should the primary UAV fail, the second UAV takes the full
service. However, in many projects, this is not financially viable. Of course, most challenges
are not insurmountable, but it is useful to consider the range of issues that can occur which
prevent successful data capture and whether you are equipped, both in terms of resources
and expertise, to deal with them.
For example, with a fixed=wing UAV it can be difficult to predict the exact landing location
and we have had occasions where the UAV has sustained damage due to landing on stones
beneath vegetation. On one such occasion, damage was caused to the nose and parachute
servo arm. Given more experience, these repairs could have been carried out in the field
but at that point we had no experience of changing servo arms nor spares with us.
In terms of wear and tear; MFFP were carrying out pre-flight checks in the field when we
noticed a big difference in the amount of deflection of the ailerons. This was caused by wear
and tear to the wing servo which required replacement. This issue actually took from 30th
June until 7th August to be fully resolved; resulting in a large period of potential flying time
being lost.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
24
11. Ground survey
In order to classify aerial photographs into a land-cover map (image classification) it is
necessary to have ground-truth data for both image training and error determination. It is
also important to collect data in a way that is relevant to the resolution of the aerial data. The
following section presents the ground survey methodology used by MFFP.
11.1. Methodology
In 2018, the location of ‘single-species stands’ of approximately 20 x 20 cm were recorded
using a Trimble Geo 7X DGNSS. For each species, the survey team aimed to record a
minimum of 20 samples per site. The survey team walked between the GCP target locations
to ensure good site coverage. Usually, one day per site was spent conducting the ground
survey.
It was found that this method did not provide sufficient records, or spatial distribution
(Clutterbuck et al., 2019). Despite the surveyors covering the whole site, the spatial
distribution of records was clustered because single-species stands occurred more
frequently in gullies, while the vegetation on the tops was more heterogeneous and
therefore unsuitable for recording.
As a result, image classification for this first round of reporting was therefore undertaken
utilising all available ground-truth data for image training, rather than adopting standard
procedures of retaining 50% for error determination. This prevented the comprehensive
testing of protocols most suited for processing UAV imagery of these habitats (Clutterbuck
et al., 2019).
In 2019, every effort was made to increase the number and spatial distribution of vegetation
survey samples. Each survey site was divided into approximately 100 grid squares. A circular
area of approximately 30m radius in the centre of each survey grid square, the search locus,
was searched for ‘single-species stands’ of approximately 50 x 50 cm. One sample of each
species were marked using the Trimble DGNSS at each search locus (Clutterbuck & Yallop,
2019). A ‘running tally’ of each species was kept and additional samples recorded if species
with a low number of records were observed in transit to each sample location. The overall
aim of the sampling effort was to attempt to identify 100 examples of all species present at
each study site. At the cessation of field survey the target of 100 samples at each site was
only achieved for some species, either as a result of absolute scarcity or the lack of single
stands of adequate size (Clutterbuck et al., 2020).
With only one Trimble unit, a survey team of three was found to be the most efficient. At
the first search locus all three surveyors marked ‘single-species stands’ using canes. Once
marked, two surveyors remained at the first site to record the locations, using the Trimble,
and collect the markers, while the third surveyor moved onto the second site to start
marking stands. When the first site was complete, the two surveyors moved onto the
second site. The Trimble user remained with the marker of the second site, while the third
surveyor moved onto the next site, and so on in this leap-frogging manner. This method
was very time consuming. Between 13 and 16 days per site was spent conducting the
surveys.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
25
12. Data
There are many important considerations when thinking about data including: data privacy;
data transfer, storage and backup; data processing and analyses; and data quality. It is
important that the complete workflow from capturing the data until the results that are
required are carefully thought through before starting to acquire or use a UAV (Wich and
Koh, 2018).
12.1. Data privacy
Where UAVs are used for commercial work, operators will need to comply with data
protection obligations. UAVs may record images of individuals inadvertently and although
individuals may not always be directly identifiable from the footage, they may be identified
through the context. As such, it is important that you can provide good justification for their
use by carrying out a robust privacy impact assessment (PIA) (ICO, 2017).
A PIA is a process which assists organisations in identifying and minimising the privacy risks of
new projects or policies (ICO, 2013). Any processes established as a result of a PIA must also
comply with General Data Protection Regulation (GDPR). Further information on carrying
out a PIA and on GDPR can be found on the Information Commissioner’s Office (ICO)
website (https://ico.org.uk/).
Suggestions for minimising the privacy risks associated with UAV data include:
Wearing high visibility clothing that identifies operators as UAV operators
Placing signage in appropriate locations to explain that a UAV is operating with a
camera and what the data will be used for
Staffing footpaths to communicate information with any members of the public
Having a privacy notice on your website that you can direct people to
Ensuring that any data collected is stored securely (see Figure 12-1)
Ensuring that data is only used for the initial purpose it was collected for
Considering (and justifying) suitable retention times for the data

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
26
Figure 12-1: Secure data storage workflow
12.2. Data transfer, storage and backup
It is necessary to ensure that sufficient data storage is available for all the data that will be
collected; to know how much data storage will be required; how the data will be backed up;
how much this will cost; how long the data will be retained for; and if the data is to be retained
permanently, how it will be stored longer term.
It is also important to consider redundancy. According to Calvo (2016–17), having a secure,
redundant, up-to-date backup system is essential. A backup system is not such, unless there
is redundancy. One external hard drive plus your computer’s internal hard drive is not a safe
system. All hard drives may eventually fail, so follow the rule of three. Backing up in at least
three hard drives is a good idea.
In the experience of MFFP, we are collecting too much data to be stored on the Peak
District National Park Authority (PDNPA) servers, and as such money had to be found
within the project to purchase additional primary storage and backup, which has not been
an insignificant amount of money. Once this particular project has finished there will not be
funds available to continue paying for additional server space. At this point only the
essential, most up-to-date data will be kept on the server, with the remaining data
transferred to hard drives, following the rule of three.
To get an idea of how much data you may collect see Table 12-1. All data captured in
Table 12-1 was captured with a senseFLY eBee platform flown at 60–70m above ground.
Raw data collected by
camera SD card during
UAV survey
Raw data transferred to
the secure PDNPA
network when practical
(same or next day)
SD card data deleted
(thereby avoiding
unsecure duplicate data)
If transfer of data is
required, this should be
via MailBigFile secured in
a password protected zip
file
Processed data outputs
stored securely
according to the PDNPA
IT policies

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
27
Table 12-1: Total storage space required for a 70ha site flown with three different sensors
Sensor
Ground sample
distance (cm)
Flight area
(ha)
No. of
images
Total size
(GB)
SODA (RGB)
2.2
70
803
6.7
Sequoia (4-band G, R,
RE, NIR)
9.6
75
5656
13.2
thermoMAP
16.8
70
15785
6.7
26.6
In addition to ensuring that any data collected is stored securely (see Figure 12-1), it is also
good practice to download and post-process data as quickly as possible on return from the
field, including any ancillary data, such as DGNSS data. A consistent folder structure and
naming protocol is essential to ensure good data management. As an example we provide the
structure used by MFFP below (Figure 12-2).
Figure 12-2: MFFP folder structure and naming protocol
12.3. Data processing and analyses
When planning data processing and analyses it is necessary to consider what type of
processing and analyses will be conducted; what software and hardware are needed; whether
in-house capacity and knowledge is available; or whether parts of the processing and analyses
need to be outsourced.
MFFP took a two-pronged approach in which MFFP processed the data using Pix4D Mapper
Pro to produce point clouds, orthomosiacs (e.g. flat top view) and digital surface models
(DSMs (e.g. 3D layer)) and then outsourced the analyses to experts to classify the imagery.
YYYYMMDD_Site_name
GCPS
Images
Multispectral
Flight 1
Calibration
01. Before flight
02. After flight
MS
RGBFlight 2 etc.
RGB
Flight 1
Flight 2 etc.
Thermal
Flight 1
Flight 2 etc.
Logs
UAV Log_YYYYMMDD_
Flight no.
Pix4d
VEGN

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
28
In order to process the images efficiently MFFP used Pix4D and a high-specification
computer. The processing itself is not overly time consuming. With Pix4D, there are three
processing stages (initial; point cloud and mesh; and DSM, othomosiac and index) when
intervention is necessary but after which the software can be left to run the process. The
time-consuming element is marking the location of the GCPs, particularly in the
multispectral dataset in which it is necessary to mark the GCPs in each independent
multispectral band.
This is because low-cost multispectral cameras developed for UAVs, including the RedEdge
and Sequoia, have independent sensors for each spectral band. Manufacturing tolerances
mean that each sensor will be oriented to some extent at different angles to each other
giving slightly different fields of view. Therefore, GCPs have to be marked in imagery for
each band so that the resultant orthomosaic for each is aligned with the orthomosaic of
the other bands (Clutterbuck et al., 2019).
12.4. UAV Data Quality
The development of SfM (Surface-from-Motion) has made it possible to derive high-quality
outputs (i.e. point clouds, orthomosiacs and DSMs) despite the challenges associated with
conventional photogrammetry (Wich and Koh, 2018). Among these are the variability in
camera pose (attitude) and illumination between images, perspective distortion due to low
flights, limited accuracy of GPS and IMU on board the UAV, perspective distortions due to
the lower flight altitude of drones compared to manned aircraft, and lens distortion (Wich &
Koh, 2018 and references therein). Below we describe some of the challenges faced by MFFP
in the classification of UAV-captured imagery.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
29
12.4.1. Quantity and quality of field data
The success of image classification was limited by small sample numbers, as well as
incomplete spatial distribution across the imaged areas. Alongside that issue it became
apparent during processing that target sample numbers for each species needed increasing
beyond the original estimations (see Section 11.1) (Clutterbuck et al., 2019).
As a result, image classification was undertaken utilising all available ground-truth data for
image training. This meant that no formal error assessment could be carried out, without
which it is difficult to assess the classification accuracies achieved by the supervised
classification. However, for some sites the identified distributions of outlier classes like bare
peat and rock seem to match visual interpretation of RGB imagery. There is little evidence
for the accuracy of other classes. In a limited exploration of classification accuracy for one
site (the site with the most available field data), the overall classification accuracy was
measured at 43%. The accuracies for different classes varied from very good for a few
classes to very poor for others. Unambiguously “good” classes were bare peat and rock,
which is unsurprising given their clear NIR responses. “Poor” classes included species like
Juncus effusus (10% user accuracy), Empetrum nigrum and Chamaenerion angustifolium (13%).
Juncus effusus was confused by the classifier with Agrostis, cushion moss, Deschampsia
flexuosa, Eriophorum angustifolium and Polytrichum spp. (Clutterbuck et al., 2019).
12.4.2. Large area coverage and multiple sensors and flights
UAVs, at the altitudes to which they are restricted in the UK, produce high spatial
resolutions but extremely limited ‘footprints’ necessitating flying numerous flight-lines. As
a result, the time required to cover even modest areas can be considerable. Over this
period, light levels, colour balance and the angle of the sun are changing. During 2018, these
issues were compounded by the need to fly each area twice using different sensors (see
Section 5) to provide the required B, G, R, NIR imagery. Predicting the effect this has on
the accuracies of automated image-classification is complex, however it can be stated that
it is unlikely to be beneficial (Clutterbuck et al., 2019).
UAV data collection took place between mid-July and the end of August 2018. We were
very fortunate with the weather; however, the length of time required to collect data with
multiple sensors over multiple flights affected the quality of the data. As the multispectral
data for each site were collected over a period of 1–2 hours, sun-angle and illumination
changed during this time creating visible striping in the data. These stripes have been
identified as single taxa in the classified product (e.g. Vaccinium myrtillus). In addition, the
proportion of the same taxa identified in the classified data for adjacent survey areas appears
unrealistic. For example, at one site around 20% of the area was classified as Feather Moss,
while in the overlapping adjacent site, the cover of Feather Moss was <3%.
To resolve this issue, MFFP decided to return to ‘traditional’ airborne digital image capture
via a contractor. These can now be obtained close to, or better than, the resolution
anticipated for the UAV capture. The images required to cover each MFFP field laboratory
and surrounding area can be captured in a day. This overcomes many of the potential
concerns associated with the slow process required to ‘build’ coverage of large areas with
UAVs, e.g. transitions in light intensity, changes in light angle, potential for image blur in

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
30
strong wind, incomplete capture in a single flight due to change in weather or equipment
failure.
We also thought that airborne photography would remove the risks to image capture
associated with site access restrictions, increasing the likelihood of finding ‘windows’ of
good weather for flying; however see section 3.4.
13. Summary
The aim of this document is to provide a guide to the use of UAVs for conservation
practitioners, which is based upon MFFP’s experiences (successes, challenges and lessons
learned) of using UAVs for peatland monitoring and conservation. We hope that it will enable
other practitioners to make more informed decisions on the appropriate approach to take,
whether sufficient resources (budget and people) are available, and whether the chosen
approach will deliver the desired outputs. Table 13-1 summarises the main successes,
challenges and lessons learnt by MFFP during our journey into using UAVs for peatland
monitoring and conservation.
Table 13-1: Summary of main successes, challenges and lessons learnt
Successes
Challenges
Lessons learnt
Ability to respond to and
capitalise on suitable flying
days
Availability of training sites
Consider the level of
experience within the team
Excellent geometric
accuracy
Landowner/ tenant
permission
Consider the complexity of
the UAV system
Excellent resolution
Technical issues with
equipment
Consider the difficulties of
‘large’ area coverage

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
31
14. References
ANO 2016 (2016) The Air Navigation Order 2016 (Online). The Air Navigation Order
2016 (legislation.gov.uk). Accessed 10 March 2021.
Brooke, C. & Clutterbuck, B. (2019) Mapping Heterogeneous Buried Archaeological
Features Using Multisensor Data from Unmanned Aerial Vehicles. Remote Sensing; 12(1):
41.
Butcher, L. & Haylen, A. (2018) Airspace Change and Modernisation (Online)
https://researchbriefings.files.parliament.uk/documents/CBP-7889/CBP-7889.pdf.
Accessed 13 February 2020.
CAA (2015a) Information for the public about UAS and drones (Online). Information for the
public about UAS and drones | UK Civil Aviation Authority (caa.co.uk). Accessed 10
March 2021.
CAA (2015b) Flying in the open category (Online). Flying in the open category | UK Civil
Aviation Authority (caa.co.uk). Accessed 11 March 2021.
CAA (2015c) Guidance on using unmanned aircraft and drones for commercial work
(Online). https://www.caa.co.uk/Commercial-industry/Aircraft/Unmanned-aircraft/Small-
drones/Guidance-on-using-unmanned-aircraft-and-drones-for-commercial-work/.
Accessed 10 March 2020.
CAA (2015d) Flying in the specific category (Online).
https://www.caa.co.uk/Commercial-industry/Aircraft/Unmanned-aircraft/Small-
drones/Flying-in-the-specific-category/. Accessed 1 July 2021.
CAA (2019a) The Drone and Model Aircraft Code (Online). Getting what you need to
fly | UK Civil Aviation Authority (caa.co.uk). Accessed 11 March 2021.
CAA (2019b) CAP 722: Unmanned Aircraft System Operations in UK Airspace – Guidance &
Policy (Online).
https://publicapps.caa.co.uk/modalapplication.aspx?appid=11&mode=detail&id=415.
Accessed 13 February 2020.
CAA (2020a) Unmanned Aircraft Systems Drone and Model Aircraft Registration and
Education System (DMARES) Enforcement Guidance CAP 1974 Second Edition (Online).
Drone and Model Aircraft Registration and Education System (DMARES) Enforcement
Guidance (caa.co.uk). Accessed 11 March 2021.
CAA (2020b) Using a drone for work (Online). DRONE RULES: USING A DRONE FOR
WORK (caa.co.uk). Accessed 11 March 2021.
CAA (2021a) CAP 1789A UK Consolidation – Regulation (EU) 2019/947 (as retained in UK
law) (Online). UK Consolidation - Regulation (EU) 2019/947 (as retained in UK law)
(caa.co.uk). Accessed 10 March 2021.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
32
CAA (2021b) Registering to use a drone or model aircraft (Online). Registering a drone
or model aircraft | UK Civil Aviation Authority (caa.co.uk). Accessed 11 March 2021.
CAA (2021c) Where you can fly (Online). https://register-drones.caa.co.uk/drone-
code/where-you-can-fly. Accessed 1 July 2021.
Calvo, K. (2016-17) Drones for Conservation: Field Guide for Photographers, Researchers,
Conservationists and Archaeologists.
Clutterbuck, B. and Yallop, A. (2017) Indicative protocol for UAV flights and ground truthing
for Moors for the Future Partnership. Nottingham Trent University and CS Conservation
Survey.
Clutterbuck, B., Chico, G., Labadz, J., Midgley, N. (2018) The potential of geospatial
technology for monitoring peatland environments. In: J.M. FERNÁNDEZ-GARCÍA and
K.J. PÉREZ, eds., Inventory, value and restoration of peatlands and mires: recent contributions.
Bilbao: Provincial Council of Bizkaia, pp. 167–181.
Clutterbuck, B., Yallop, A. and Thacker, J. (2019) Technical Report: MFFP UAV vegetation
mapping Phase 1. Nottingham Trent University and CS Conservation Survey.
Clutterbuck, B. & Yallop, A. (2019) Vegetation survey protocol – July 2019. Nottingham Trent
University and CS Conservation Survey.
Clutterbuck, B., Yallop, A. and Thacker, J. (2020) Technical Report: Monitoring the impact
of blanket bog conservation in the South Pennine Moors Special Area of Conservation using an
Unmanned Aerial Vehicle Phase 2. Nottingham Trent University and CS Conservation
Survey.
Cunliffe, A. M., Anderson, K., DeBell, L. & Duffy, J. P. (2017) A UK Civil Aviation (CAA)-
approved operations manual for safe deployment of lightweight drones in research.
International Journal of Remote Sensing; 38 (8–10): 2737–2744.
Duffy, J. P., Cunliffe, A. M., DeBell, L., Sandbrook, C., Wich, S. A., Shutler, J. D., Myers-
Smith, I. H., Varela, M. R. & Anderson, K. (2018). Location, location, location:
considerations when using lightweight drones in challenging environments. Remote
Sensing in Ecology and Conservation; 4 (1): 7–19.
ICO (2013) Conducting privacy impact assessments code of practice (Online).
https://ico.org.uk/media/about-the-ico/consultations/2052/draft-conducting-privacy-
impact-assessments-code-of-practice.pdf. Accessed 23 April 2020.
ICO (2017) In the picture: A data protection code of practice for surveillance cameras and
personal information v.1.2 (Online). https://ico.org.uk/media/for-
organisations/documents/1542/cctv-code-of-practice.pdf. Accessed 23 April 2020.
Küttim, M., Küttim, L., Ilomets, M., Laine, A. M. (2019) Controls of Sphagnum growth
and the role of winter. Ecological Research; 2020 (35): 219–234.

A conservation practitioner’s guide to the use of unmanned aerial vehicles (UAVs) for peatland monitoring and
conservation: an exploration of the successes, challenges and learning of a UAV-based approach
33
Natural England (2020) Give notice and get consent for a planned activity on an SSSI
(Online). https://www.gov.uk/government/publications/request-permission-for-works-or-
an-activity-on-an-sssi. Accessed 3 March 2020.
Wich, S. A. and Koh, L. (2018) Conservation Drones Mapping and monitoring
Biodiversity. Oxford University Press, UK.
