
Golf Alltrack

04 Introduction
05 Exterior
07 Interior
09 Highlights
10 Colours & Upholstery
11 Volkswagen Accessories
12 Specification Highlights
13 5 Year Warranty
14 Volkswagen Choice
Contents

2Contents
132TSI Premium with Sport Luxury Packages shown

132TSI Premium with optional Sports Luxury Package shown

Introduction 4
The Golf Alltrack has been designed and built with the needs of the modern Australian driver
firmly in mind. Versatile, comfortable and stylish, the Golf Alltrack is the perfect all-rounder,
a vehicle engineered to take on challenging long-distance drives, but just at home on short
drives around the city.
With two variants available to choose from, the Golf Alltrack can be attuned to fit perfectly
with the demands of your lifestyle. Volkswagen’s tried and tested 132kW TSI petrol engine
offering comes in Standard and Premium trim.
The latest range presents a fresh and confident face to the world courtesy of a number of
design updates. Revisions to the Golf Alltrack’s rugged and eye-catching body shape, plus the
addition of LED technology to front and rear lights, and interior trim and decorative inlays,
combine to make a bold statement. Other appealing features stay exactly the same, such as
confidence-inspiring 4MOTION technology, which is a standard inclusion across the range.
All Volkswagens are equipped with the very latest technology and the Golf Alltrack is no
exception. The vehicle brims with the latest advancements in driver assistance technology,
while there’s no denying the appeal of the Golf Alltrack’s optional Sound & Vision package with
the Discover Pro 9.2” infotainment system, Dynaudio premium audio and Active Info Display.
Offering the ultimate in all-terrain, all-purpose driving, the Golf Alltrack is truly a vehicle for
the adventurous and the adventurous at heart.
Golf Alltrack
The anywhere Golf

Exterior
Sporty, stylish and sturdy, the Golf Alltrack combines the space and practicality of a family-sized
wagon with the go-anywhere resilience of a robust off-roader. Styling enhancements reveal an
evolution of the Golf Alltrack shape, meaning it is better equipped than ever before to withstand the
challenges presented by the great Australian outdoors.
With its raised ground clearance, the Golf Alltrack can take on uneven surfaces with confidence, while
durable 17" Valley alloy wheels (and optional 18” Kalamata alloy wheels) keep the Golf Alltrack firmly
planted, whether on bitumen or loose gravel.
Rugged it may be, but the Golf Alltrack sacrifices nothing in terms of style and poise. Chrome and
silver highlights all around the vehicle lend an attractive touch. These highlights include Silver door
mirrors and side sill extensions, as well as Silver underbody trim and chrome trim strips on the side
windows. Chrome roof rails provide the perfect excuse to stow additional gear next time you embark
on a long-haul trip.
Country driving requires clear night-time vision and the ability to be seen from afar. With LED daytime
lights and LED tail lights as standard, the Golf Alltrack is an assertive and distinctive presence on the
road. LED headlights within the Premium variant casts an exceptionally strong beam over the
oncoming road. Front fog lights with static cornering lights illuminate the way when visibility is
compromised. A bold rear diffuser distinguishes the Golf Alltrack from the rear, while exposed dual
chrome exhaust tailpipes complement the chrome highlights found elsewhere on
the bodywork.
01
02
01 17-inch Valley alloy wheels
02 18-inch Kalamata alloy wheels
(available on optional Sport Luxury Package)

6Exterior
132TSI Premium with optional Sport Luxury Package
02
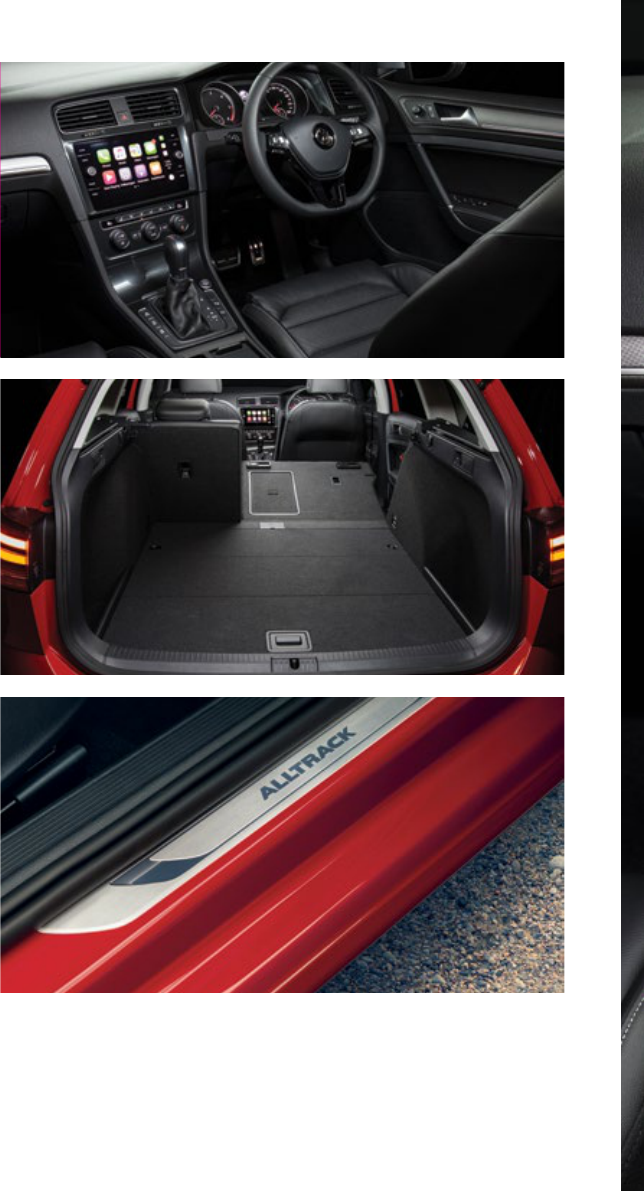
Interior
The Golf Alltrack is as luxurious and comfortable inside as it is stylish and durable outside.
Quality materials have been used throughout the cabin, including interior trims and decorative
inlays, raising refinement to levels unsurpassed in the Golf Alltrack’s class. The leather multi-
function steering wheel and gearshift knob are a delight to touch, as are the comfortable and
supportive seats complete with Black ‘Summits’ cloth (132TSI) or perforated leather appointed
(Premium variants) seat upholstery
#
.
And this wouldn’t be a Volkswagen if it wasn’t equipped with the very latest technology to make
every drive an enjoyable one. Volkswagen’s attractive and intuitive 8” infotainment system with
App-Connect
~
puts the world of information and entertainment at the driver’s fingertips, while
selecting the optional Sound and Vision Package equips the vehicle with the next-generation
Discover Pro 9.2" satellite navigation system with Gesture Control
‡
, Dynaudio Excite 400W
premium audio system and impressive Active Info Display
‡
instrument cluster.
Unlocking and starting the Golf Alltrack is a cinch with clever Keyless Access. As long as you have
your key on you, the doors will unlock just by operating a front door handle. The system releases
the steering lock and turns on the ignition electronically without you having to insert the key. The
engine can then be started simply by pressing the start button.
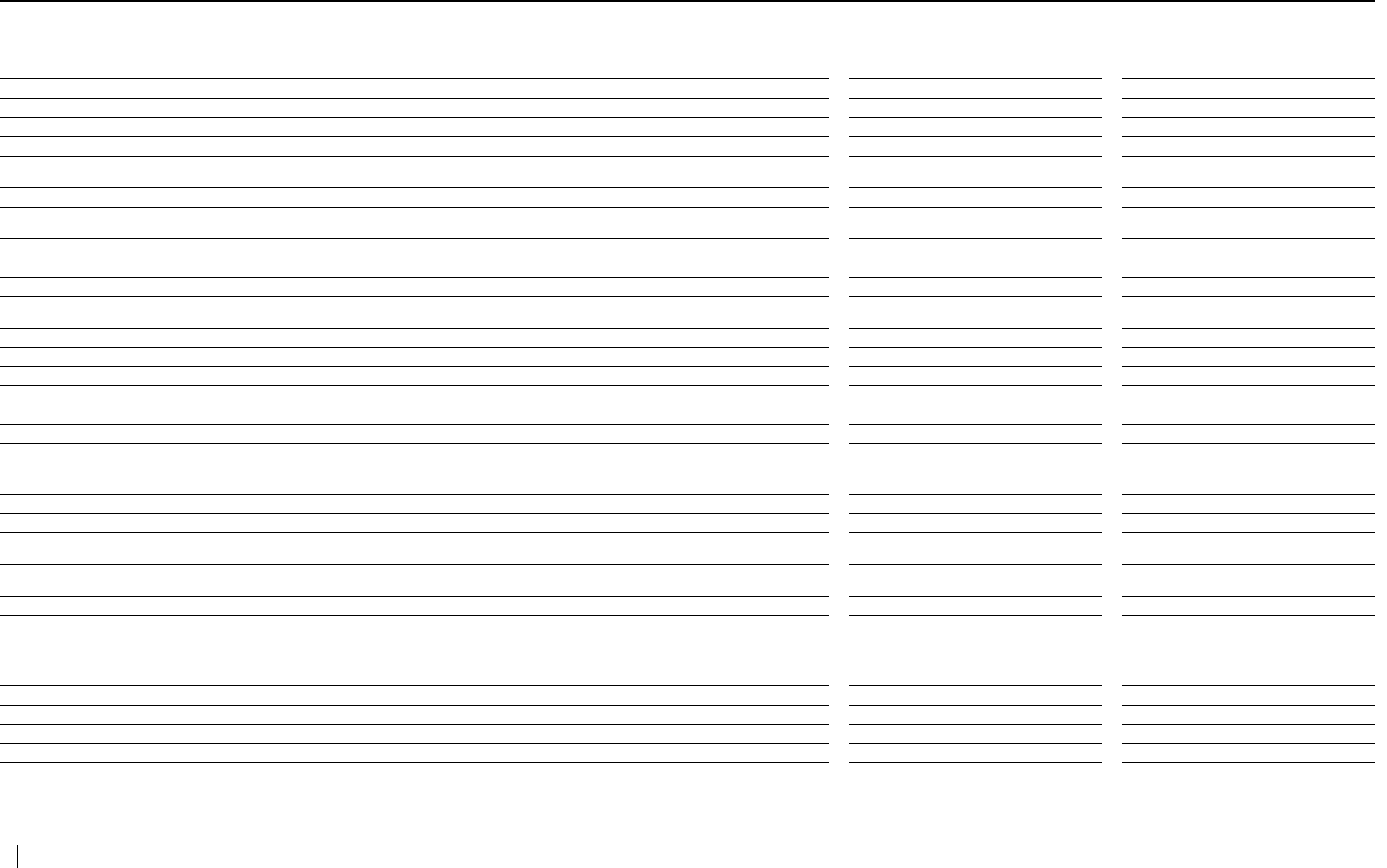
Of course, any wagon worth its salt needs a large luggage compartment. The Golf Alltrack has an
impressive 605 litres of boot space available, making it enormously useful whether on a camping
holiday or a trip to the local supermarket. With the rear seats folded down, the capacity becomes
an outstanding 1620 litres. The 40/60 split folding rear seats even offer remote unlocking for
ease of use. A luggage partition net keeps belongings separate from the cabin of the car for
added convenience.
01 Vienna leather appointed seat upholstery* with heated front seats
02 Spacious luggage compartment
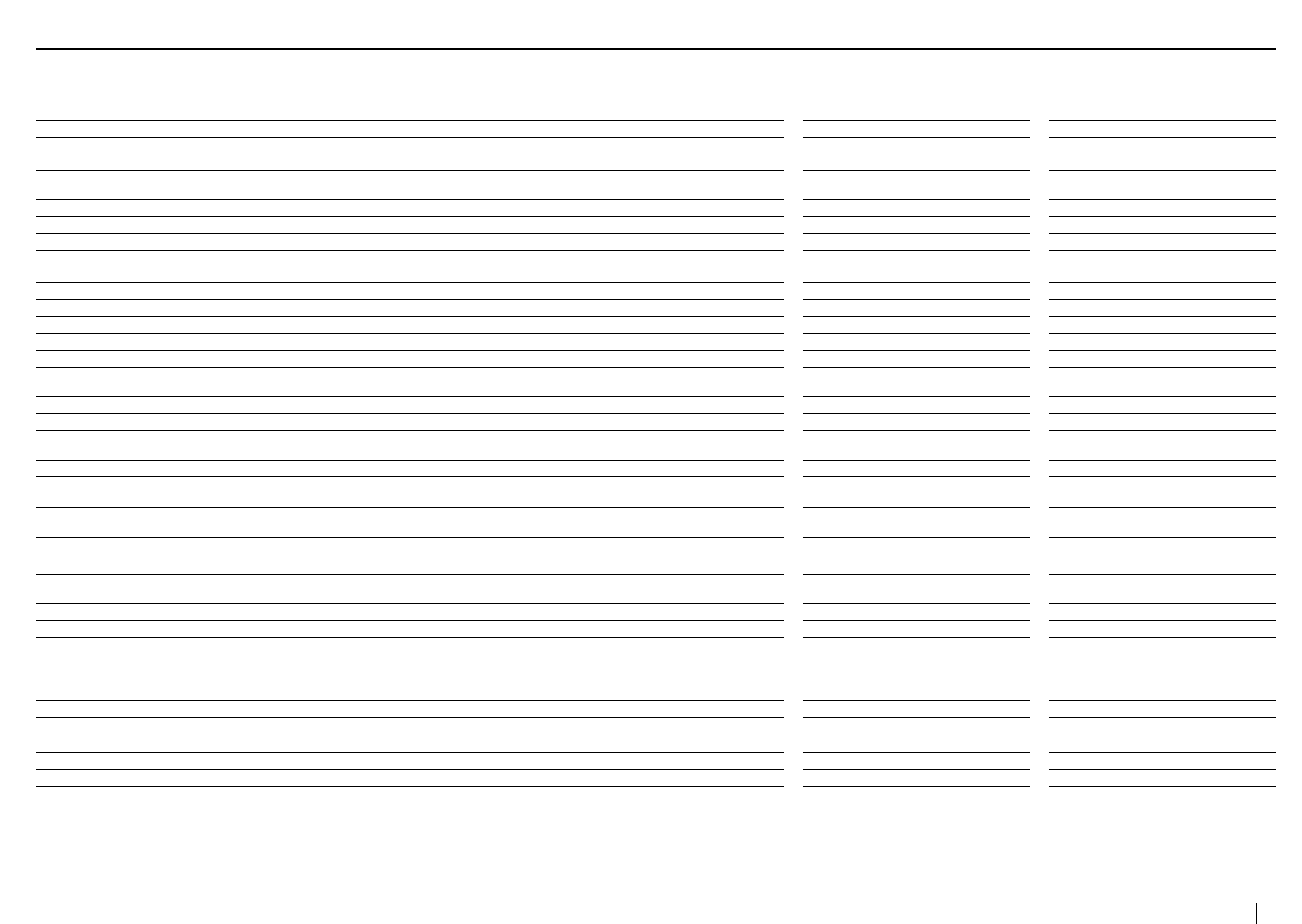
03 Front door stainless steel sill scuff plates
01
03
#
Leather appointed seats have a combination of genuine and artificial leather, but are not wholly leather.
~App-Connect is compatible for selected apps with the latest smartphone versions of iOS and Android, active data service, and connection cable (sold separately). ‡Available as part of the optional Sound and Vision Package.

Interior 8
132TSI Premium model shown with App-Connect featuring Apple CarPlay®

Highlights
The Golf Alltrack promises a serene and confidence-inspiring driving experience courtesy of its refined transmission and
engine.
The powerful 1.8-litre turbocharged 132kW TSI petrol engine is a perfect match with Volkswagen's sophisticated and
sweet-shifting Direct Shift Gearbox (DSG). The Golf Alltrack's engine is equiped with BlueMotion technologies to help
promote economical driving.
With 4MOTION all-wheel drive standard across the entire range, the Golf Alltrack has been optimised to tackle even the
most challenging terrain. It works in partnership with other clever technology such as Extended Electronic Differential
Lock (XDL) and Electronic Stabilisation Program (ESP) to maximise traction even on challenging surfaces.
Further assisting drivers is Driving Profile Selection, which allows for customisation of the Golf Alltrack’s settings to suit
prevailing conditions. As well as the pre-set driving modes of Normal, Sport and Eco, the Golf Alltrack features an Off-road
mode that activates Hill Descent Control* and adapts the Anti-Lock Braking System (ABS) and accelerator pedal response
for off-road driving.
The result is an exceedingly safe and reassuring drive that is helped further by a wide range of safety and assistance
systems as standard. This includes Manoeuvre Braking*, front and rear; which assists the driver to avoid or reduce damage
in a potential low speed impact by initiating emergency braking, Front Assist with City Emergency Brake (City EB) and
Pedestrian Monitoring*, Multi-Collision Brake and Driver Fatigue Detection* system. Optional for the 132TSI and standard
on the 132TSI Premium is Volkswagen's Park Assist* technology, as well as Traffic Jam Assist*, Emergency Assist*, Lane
Assist* and Adaptive Cruise Control (ACC)*.
Inside, the Golf Alltrack impresses with its new-generation 8” and 9.2” Discover infotainment systems. The latter is
available as part of the optional Sound and Vision Package and incorporates sophisticated Gesture Control, which allows
the driver to navigate through various menus with a simple mid-air swipe of the hand, and Media Control, which puts
passengers in control of music and more via their smartphone or tablet.
For the ultimate in driving enjoyment, the Sport Luxury Package (available for the Premium variant) includes steering
wheel mounted gearshift paddles, a panoramic electric glass sunroof and eye-catching 18” Kalamata alloy wheels.
01 4MOTION (overseas model shown) 02 Panoramic electric glass sunroof^ 03 Offroad driving selection mode
01
02
03
*Safety technologies are designed to assist the driver, but should not be used as a substitute for safe driving practices. ^Available as part of the optional Sports Luxury Package

Running Headline 10
Colours & Upholstery
The Golf Alltrack’s broad colour palette complements the
stylish interior trim, making configuration a
simplepleasure. Customise the bodywork of your
GolfAlltrack by choosing from a range of paint
finishesthatincludes Pure White, Tornado Red, striking
metallic options and Deep Black Pearl Effect. Luxurious
Black "Summits" Cloth is avaliable for 132TSI and luxurious
black Vienna leather appointed seat upholstery
#
is avaliable
on 132TSI Premium.
01 Black "Summits" Cloth
02 Vienna leather appointed seat upholstery
#
#
Leather appointed seats have a combination of genuine and artificial leather, but are not wholly leather.
Please note that Metallic and Pearl Effect paint are optional at extra cost.
The print process does not allow for exact reproduction of the exterior or
the upholstery colours. Please contact your Volkswagen Dealer for further
information on colours and upholstery combinations.
0201
03 Pure White
04 Tungsten Silver Metallic
05 Tornado Red
06 Indium Grey Metallic
07 Deep Black Pearl Effect
03 04 05
06 07

Roof bars with Premium Roof box
Sunblind set
Luggage compartment
Bicycle carrier
Towbar package
Tablet holder
Volkswagen Accessories
Our comprehensive range of genuine accessories give you the freedom
to customise the look and feel of your Golf Alltrack to reflect your own
personality and individual sense of style.
Overseas models are shown for illustrative purposes only. Optional accessories at extra cost. Please note that the
above accessories may have an effect on fuel efficiency. Items such as sports equipment and tablets are shown for
illustration purposes only and are not available for purchase from Volkswagen Group Australia or its Dealers. For a
full range of Volkswagen Genuine Accessories, please refer to the accessories tab at vwww.volkswagen.com.au or
visit an authorised Volkswagen Dealer.

*Safety technologies are designed to assist the driver, but should not be used as a substitute for safe driving practices.
~App-Connect is compatible for selected apps with the latest smartphone versions of iOS and Android, active data service, and connection cable (sold separately).
#
Leather appointed seats has a combination of genuine and artificial leather, but are not wholly leather.
Specification Highlights
1.8L 132kW / 280Nm 1.8L 132kW / 280Nm
Optional Sound & Vision package
Active Info Display, 9.2” satellite navigation, Gesture Control, Voice Control and Dynaudio Excite 400W premium audio system
Optional Driver Assistance package*
Adaptive Cruise Control (ACC), Lane Assist with adaptive lane guidance, Traffic Jam Assist,
Emergency Assist, Park Assist and proactive occupant protection system
Optional Sport Luxury package
18” alloy wheels, gearshift paddles, panoramic electric glass sunroof
and dark tinted rear and rear side windows
• Front Assist with City Emergency
Brake (City EB) and Pedestrian
Monitoring*
• 17” alloy wheels
• 8” satellite navigation system
• App-Connect~
• Media Control
• Leather multi-function steering wheel
• Rear View Camera (RVC)*
• Parking distance sensors with
manoeuvre braking* front and rear
• Keyless Access, keyless entry and
starting system
• Electrically foldable exterior mirrors
• Driver fatigue detection system*
• Driving Profile Selection with off-road
mode
• Air Care dual zone climate control air
conditioning
• Automatic headlight function
• Rain sensing windscreen wipers
• LED tail lights and daytime driving lights
• Carpet floor mats
• Adaptive Cruise Control
(ACC)*
• Lane Assist* with adaptive
lane guidance
• Traffic Jam Assist*
• Emergency Assist*
• Park Assist*
• Light Assist
• Proactive occupant
protection system
• Vienna leather appointed
upholstery
#
• Comfort sport front seats
• Heated front seats
• Electrically adjustable
driver’s seat with memory
function
• Exterior mirrors with
memory function
• LED headlights
• Colour Multi-Function
Display (MFD Premium)
6 speed DSG
4MOTION all-wheel drive
6 speed DSG
4MOTION all-wheel drive
132TSI Premium132TSI
Specification highlights in addition to the 132TSI
For more information on features and specifications, please download the specification sheets available at www.volkswagen.com.au.
Optional Metallic and Pearl Effect paint finishes
Specification Highlights 12

*Conditions and exclusions apply, see https://www.volkswagen.com.au/en/owners/warranty.html. Your rights under this warranty are provided in addition to, and in some cases overlap with, consumer guarantees under the Australian Consumer Law
and do not limit or replace them.
^Volkswagen Roadside Assist is provided by AWP Australia Pty Ltd ABN 52 097 227 177 trading as Allianz Global Assistance, under an arrangement with Volkswagen Group Australia Pty Limited ABN 14 093 117 876. Conditions and exclusions apply,
see https://www.volkswagen.com.au/en/owners/roadside-assist.html.
†Volkswagen Care Plans are available at participating Volkswagen Dealers for all models and covers standard items as contained in each scheduled service interval only. These Care Plans can only be purchased prior to the first scheduled service and
up to 22,500 km/15 months (whichever occurs first) for all models except Volkswagen Crafter models, which is 30,000 km/15 months (whichever occurs first). The timeframe takes effect from when the vehicle is first reported in our system as ‘sold’.
Discount structure varies by model. For details of what is not included in a scheduled service, see https://www.volkswagen.com.au/en/owners/volkswagen-care-plans.html.
#Assured Service Pricing applies to the first 5 standard scheduled services of your vehicle which are scheduled to occur at every 15,000 km/12 month interval (whichever occurs first) or for Volkswagen Crafter models only, 20,000 km/12 month
interval (whichever occurs first). On or before 31 December each year, Volkswagen will publish the maximum price for a specified Scheduled Service that will be applicable from, and remain fixed for, the following calendar year only. For details on the
Eligible Model List, pricing, items not included and for full terms and conditions, please see https://au.volkswagen.com.au/service-pricing-guide.
years
Unlimited Kilometre
Warranty
year
Roadside Assist
Assured
Service Pricing
Volkswagen
Care Plans
At Volkswagen, we pride ourselves on
the highest quality standards that come
with German engineering.
We back this commitment with a year
unlimited kilometre warranty on all new
Volkswagen vehicles*.
Every new Volkswagen comes with
a year Roadside Assist membership
^
.
That’s hour roadside assistance,
emergency accommodation, car rental
and towing as well as property and
other assistance, all included for added
peace of mind.
Assured Service Pricing
#
gives you the
transparency of knowing how much your
service will cost up front.
Our Volkswagen Dealers have access to
the latest diagnostic equipment and
tools. Plus, they use Volkswagen Genuine
Parts® to ensure your Volkswagen stays a
Volkswagen.
You’re in safe hands at your Volkswagen
Dealer when it comes to servicing.
Peace of Mind
Volkswagen Care Plans
†
have
you covered for your first or
scheduled services, providing you
savings off the total Assured Service
Pricing RRP. It’s convenient, hassle-
free scheduled servicing easily
available for purchase at your local
Volkswagen Dealer.

14Volkswagen Choice
^The Volkswagen Choice Program consists of an option to return the vehicle to Volkswagen Financial Services (VFS)** at the end of the term and require VFS to purchase the vehicle at price known as the Guaranteed Future Value (GFV) as determined
by VFS . At the end of the term, you can elect to: (1) trade-in the vehicle; (2) exercise the option to return the vehicle; or (3) retain the vehicle by paying the GFV, which is a lump sum owed to VFS at the end of the loan term after all repayments have
been made. You will be liable for any loan contract deficit and additional charges, if you exceed the nominated kilometre allowance and/or the vehicle is not in an acceptable condition. Available on new and demonstrator Volkswagen vehicles for
selected models. Contact your nearest Volkswagen dealer to verify eligible vehicles for this program. Fleet, government, rental buyers, hire car and chauffeur companies excluded.
**VFS is trading name of Volkswagen Financial Services Pty Ltd ABN 20 097 071 460, Australian Credit Licence 389344.
Volkswagen Choice
Naturally we understand that your
Volkswagen represents a valuable
investment, so we understand that
you want to maintain it in premium
condition. Volkswagen Choice
^
is
a finance program tailored to the
requirements of Volkswagen owners
by providing assurance around your
Volkswagen’s future value
^
, whilst
offering simple monthly instalment
financing options.
Whether you are selecting your new
Volkswagen for business or personal
use, you can choose the contract term
that best suits your requirements.
Enjoy the confidence that comes from
having locked in a minimum value up
front to be attributed to your vehicle at
the end of your contract
^
. There are also
no account keeping fees with a fixed
interest rate.
Trade in
If you wish to trade-in your
Volkswagen for a new vehicle,
all you need to do is return
it to the dealership. If the
trade-in value is higher than
the Guaranteed Future Value
^
,
you can use this equity towards
your new vehicle purchase.
Retain
If you prefer to retain your
Volkswagen, simply let us
know. Provided that you also
meet the relevant payment
obligations under your contract,
you can purchase your vehicle
outright for the Guaranteed
Future Value price locked in
at the start of the contract
^
.
Then your Volkswagen is yours
to keep. Or you can choose to
refinance your balloon at the
end of the term.
Return
All you need to do is hand
your car back and, if the
vehicle meets the agreed
kilometre and fair wear and tear
requirements
^
, you will have no
more to pay.
Step 2
Choose your preferred term from between 12
and 48 months, along with an annual km allowance
and repayment options that suit your lifestyle.
Step 1
Choose your favourite Volkswagen model.
Step 3
At the end of your chosen term, select from
one of the three below end of term options:
Volkswagen Group Australia Pty Ltd
24 Muir Road Chullora NSW 2190
ABN 14 093 117 876
Printed in Australia
April 2020
Publication: VWPGOLALLMY205
Golf Alltrack
Your Volkswagen Dealer.
Important information
Apple CarPlay® is a registered trademark of Apple Inc. Android Auto™ is a registered trade
mark of Google Inc. MirrorLink® is a registered trade mark of Car Connectivity Consortium LLC.
Volkswagen is distributed by Volkswagen Group Australia Pty Ltd (ABN 14 093 117 876) of
24 Muir Road Chullora, NSW 2190. Specifications are as planned at April 2020, for Model
Year 20.5 and are subject to change without notice or obligation. All information is this
specification sheet is correct at the time of publication, however variations may occur from
time to time and Volkswagen, in so far as it is permitted by law to do so, shall not be liable in
any way as a result of any reliance by any person on anything contained in this brochure sheet.
Authorised Volkswagen dealers will provide up-to-date information on model application,
design feature, prices, and availability on request.

Golf Alltrack
Specifications
Safety and Security 132TSI 132TSI Premium
Airbags
Driver and front passenger airbags S S
Driver’s knee airbag S S
Driver and front passenger side airbags S S
Curtain airbags, front and rear S S
Anti-theft
Electronic engine immobiliser S S
Body
Fully galvanised body with 12 year anti-corrosion perforation warranty S S
Door side impact protection S S
Rigid safety cell with front and rear crumple zones S S
Brakes
Automatic flashing brake lights activated in emergency braking situation S S
Anti-lock Braking System (ABS) S S
Brake Assist S S
Electronic Brake-pressure Distribution (EBD) S S
Electro-mechanical parking brake S S
Auto hold function S S
Multi-collision brake S S
Child restraints
Child seat top tether anchorage points (3) S S
ISOFIX child seat anchorage points, outer rear seats S S
Entry/warning reflectors in front and rear doors
S S
Head restraints
Front safety optimised head restraints, height adjustable S S
Rear head restraints height adjustable (3) S S
Lighting
Front fog lights with static cornering lights, mounted in lower bumper S S
Fog lamp, rear S S
LED daytime driving lights, integrated in headlight housing S S
LED rear registration plate light S S
Rear tail lights, LED S S
Features and Specifications
S Standard
O
Optional Extra
P
Available as part of an optional package
17 Specifications

Safety and Security (continued) 132TSI 132TSI Premium
Locking
Remote central locking S S
Keyless Access, keyless entry and starting system including starter button S S
2 stage unlocking (programmable) S S
Automatic locking after take-off (programmable) S S
One touch lock / unlock for driver S S
Child safety locks on rear doors S S
Fuel filler flap lock/unlock by remote, push to open S S
Seat belts
Front height adjustable with pre-tensioners and belt force limiters S S
Visual and acoustic warning for driver and front seat passenger seat belts not fastened S S
3 point seat belts for all passengers S S
Traction Control
Anti-Slip Regulation (ASR) S S
Electronic Differential Lock (EDL) S S
Electronic Stabilisation Program (ESP) S S
Extended Electronic Differential Lock (XDL) S S
4MOTION all-wheel drive S S
Exterior Equipment / Styling
Body enhancements
Body coloured bumper bars and door handles S S
Silver coloured exterior rear view mirrors S S
Exposed chrome exhaust tail pipes, left and right S S
Radiator grille in gloss black honeycomb with highlight in chrome and Alltrack badge S S
Lower air intake in black honeycomb with silver crossbar highlight S S
Lower side window chrome strip S S
Protective trim on lower front and rear bumpers, side sills and wheel arches S S
Silver coloured underbody side sill and bumper trim, front and rear S S
Paint
Metallic/Pearl Effect paint finish O O
Protection
Engine and transmission underbody protection S S
Roof
Roof rails, chrome S S
S Standard
O
Optional Extra
P
Available as part of an optional package
18Specifications

Exterior Equipment / Styling (continued) 132TSI 132TSI Premium
Tinted glass
Heat insulating tinted glass S S
Tinted rear tail light clusters S S
Wheels
Alloy wheels (Valley) 17x7” with 205/55 R17 tyres S S
Anti-theft wheel bolts S S
Low tyre pressure indicator S S
Weight and space saving spare wheel S S
Comfort and Convenience
Armrest
Front centre armrest, adjustable with storage box and rear air outlets (2) S S
Rear seat centre armrest with cup holders (2) and load through provision S S
Air conditioning
Air conditioning, Air Care dual zone automatic climate control with air cleaning function and allergen filter S S
Air quality and humidity sensor with automatic air recirculation S S
Dust and pollen filter S S
Cruise control
Cruise control
S S
Speed limiter (programmable)
S S
Cup holders
Front (2) S S
Rear (2) S S
Bottle holders in front door pockets S S
Driver assistance systems*
Adaptive Cruise Control P S
Distance warning display S S
Driver Fatigue Detection system S S
Driving profile selection with off-road mode S S
Emergency Assist P S
Front Assist with City Emergency Brake (City EB) and Pedestrian Monitoring functions S S
Lane Assist, lane departure warning system with adaptive lane guidance P S
Light Assist, automatic highbeam headlight function — S
Manoeuvre braking, front and rear S S
Park Assist, parking bay and parallel parking assistance P S
Parking distance sensors, front and rear with acoustic warning and audio volume level reduction when sensor warning is activated S S
Personalisation function S S
Proactive occupant protection system P S
Optical Parking System (OPS) in radio/navigation display S S
Automatic kerb function when reversing, passenger’s side exterior mirror S S
Rear View Camera (RVC) with static guidance lines S S
Traffic Jam Assist P S
19 Specifications
*Safety technologies are designed to assist the driver, but should not be used as a substitute for safe driving practices.
S Standard
O
Optional Extra
P
Available as part of an optional package

Comfort and Convenience (continued) 132TSI 132TSI Premium
Floor mats
Front and rear, carpet S S
Grab handles
Soft fold away grab handles, front and rear S S
Headlights
Coming / leaving home function S S
Combined headlight and fog light switch S S
Halogen twin headlights with LED daytime driving lights S —
Headlight range adjustment selection in infotainment system car menu S —
LED headlights for low and high beam, integrated single LED daytime driving light signature and automatic self-levelling — S
Low light sensor with automatic headlight function S S
In car entertainment and technology
Discover Media audio and satellite navigation system
8.0” colour capacitive touch screen display with smartphone style HMI and proximity sensor, AM/FM radio, CD player and 2 x SD card slots for
music and navigation data, 2D and 3D (bird’s eye) map views, compatible with MP3, WMA and AAC music files, jpeg image viewer, car menu with
convenience and service settings, security coded
S S
App-Connect
~
USB interface for Apple CarPlay®, Android Auto™ and MirrorLink® in front centre console S S
Audio, telephone, cruise control and Multi-Function Display controls mounted on steering wheel S S
Bluetooth® phone connectivity with contacts display, operation via touch screen audio unit or Multi-Function Display and Bluetooth®
audio streaming
S S
Media Control S S
Speakers, front and rear (8) S S
Instrumentation
Multi-Function Display (MFD Plus)
Monochrome display of driving data - driving time, trip length, average and current speed, average and current fuel consumption, distance till
empty, engine oil temperature, speed warning function, vehicle status, audio, telephone, driver assistance systems and convenience menus
S —
Multi-Function Display (MFD Premium)
Colour display of driving data and screen transitions with animations – driving time, trip length, average and current speed, average and current
fuel consumption, distance till empty, engine oil temperature, speed warning function, vehicle status, audio, telephone, driver assistance systems,
navigation and convenience menus
— S
Speedometer & tachometer, electronic odometer and tripmeter, fuel and coolant gauges, low fuel and vehicle system warning lights,
white illumination with red needles
S
S
Comfort indicator function (1 x touch = 3 x flash) S S
20Specifications
~App-Connec is compatible for selected apps with the latest smartphone versions of iOS and Android, active data service, and connection cable (sold separately).
S Standard
O
Optional Extra
P
Available as part of an optional package

Comfort and Convenience (continued) 132TSI 132TSI Premium
Interior highlights
Brushed chrome trim on instrument dials, vent surrounds and gearshift lever surround S S
Chrome highlight trim on headlight switch and exterior mirror switch S S
Decorative inlays, “polar night black” to instrument surround and centre console, “brushed dark metal” to passenger’s side dashboard and
doors
S S
Door sill scuff plates, front in stainless steel with Alltrack logo S S
Gearshift knob in leather S S
Stainless steel accelerator and brake pedals S S
Interior lighting
With time delay S S
Front reading lights (2) and rear passenger reading lights (2), LED S S
LED ambient lighting in driver and front passenger foot well, front door decorative inlays, door openers and handles S S
Luggage compartment
Load restraining hooks S S
Luggage compartment light S S
Luggage cover, removable and storable S S
Luggage cover, extendable with automatic (2 stage) opening S S
Luggage net partition, extendable rear seat backrest to roof lining, removable and storable S S
Shopping bag hooks S S
Storage area in side linings S S
Raised luggage compartment floor level with storage compartments S S
12 volt socket S S
Mirrors
Automatic dimming interior rear-view mirror S S
Electrically adjustable, heated and foldable exterior mirrors with environment lighting S S
LED turn indicators integrated in exterior mirrors S S
Memory function for exterior mirrors — S
Power steering
Electro-mechanical, vehicle speed and steering input sensitive S S
Seating
Comfort sports front seats — S
Electric adjustment for driver's seat with 3 position memory function — S
Height adjustment for front seats S S
Individually heated front seats — S
Lumbar adjustment for driver's seat, electrically adjustable — S
Lumbar adjustment for driver's seat, manually adjustable S —
Lumbar adjustment for front passenger seat, manually adjustable S S
Split folding rear seat backrest (40/60) S S
Rear seat backrest with remote release S S
Rear seat centre armrest with cup holders (2) and load through provision S S
21 Specifications
S Standard
O
Optional Extra
P
Available as part of an optional package
Windows
Power front / rear, with roll-back function and one-touch up-down S S
Remote operated convenience close and open feature (programmable) S S
Wipers
2 speed aero wipers with wash/wipe and vehicle speed sensitive intermittent wipe S S
Rain sensor S S
Rear window with wash/wipe and intermittent wipe S S
12V socket
Centre console S S
Luggage compartment S S
Comfort and Convenience (continued) 132TSI 132TSI Premium
Steering wheel
3 spoke leather covered flat bottomed steering wheel S S
Audio, telephone, cruise control and Multi-Function Display controls S S
Height and reach adjustable steering wheel S S
Storage
Centre console storage compartment under armrest S S
Glove compartment with cooling, illumination, coin and card holders S S
Compartment with lid in dashboard console containing App-Connect
~
USB interface and auxiliary input audio socket S S
Compartment in roof console
The roof console storage compartment is deleted when optioned with the Sport luxury package
S S
Driver’s side dashboard compartment with lid S S
Front door pockets with bottle holders, lined S S
Front seat backrest storage pockets S S
Rear door pockets, lined S S
Tray and 12 volt socket in console S S
Transmission
Gearshift recommendation indicator S S
6 speed Direct Shift Gearbox (DSG) with sport mode and Tiptronic function S S
Upholstery
'Summits' cloth seat upholstery S —
Vienna leather appointed seat upholstery
Leather appointed seats has a combination of genuine and artificial leather, but are not wholly leather
— S
Vanity mirrors
Driver’s and passenger’s side vanity mirrors in sun visor, driver's side with ticket holder S S
Illuminated on driver’s and passenger’s side S S
22Specifications
~App-Connec is compatible for selected apps with the latest smartphone versions of iOS and Android, active data service, and connection cable (sold separately).
S Standard
O
Optional Extra
P
Available as part of an optional package

23 Specifications
*Safety technologies are designed to assist the driver, but should not be used as a substitute for safe driving practices.
Optional Packages 132TSI 132TSI Premium
Driver assistance package*
Adaptive Cruise Control (ACC)
Emergency Assist
Lane Assist, lane departure warning system with adaptive lane guidance
Park Assist, parking bay and parallel parking assistance
Proactive occupant protection system
Traffic Jam Assist
O S
Sound & Vision package
Active Info Display, high resolution 12.3" TFT instrument display screen with customisable menus
Discover Pro audio and satellite navigation system
9.2” colour capacitive touch screen display with smartphone style HMI, configurable home screen and proximity sensor, Gesture Control,
Voice Control, AM/FM radio, CD player and 2 x SD card slots for music, 10 gigabyte internal storage, 2D and 3D (bird’s eye) map views,
compatible with MP3, WMA and AAC music files, jpeg image viewer, car menu with convenience and service settings, security coded
Dynaudio Excite 400W premium audio system with 10-channel digital amplifier and subwoofer
O O
Sport luxury package
Alloy wheels (Kalamata) 18x7½” with 225/45 R18 tyres (4)
Dark tinted rear side window and rear window glass, 65% light absorbing
Panoramic glass sunroof, electrically slide and tilt adjustable front half section with integrated wind deflector and sunblind
Steering wheel mounted gearshift paddles
The roof console storage compartment is deleted when optioned with the Sport luxury package
— O
S Standard
O
Optional Extra
P
Available as part of an optional package
24Specifications
Technical Specifications
Model
132TSI
132TSI Premium
Engine
1.8 litre TSI
BlueMotion Technology
Type 4 cylinder inline turbocharged direct injection petrol with engine Start/Stop system*
Installation Front transverse
Cubic capacity, litres/cc 1.8 / 1798
Bore/stoke, mm 82.5 / 84.2
Max power, kW @ rpm 132 @ 4500 – 6200
Max torque, Nm @ rpm 280 @ 1350 – 4500
Compression ratio 9.6:1
Ignition system Electronic
Exhaust emission control Exhaust gas recirculation, three way catalytic converter and lambda probes
Fuel type (Recommended) Premium unleaded 95 RON minimum
Transmission
6 Speed DSG
Driven wheels 4MOTION all wheel drive
Performance
#
0 – 100 km/h 7.8
Fuel Consumption**
Combined, L/100km 6.8
Urban, L/100km 8.4
Extra Urban, L/100km 5.9
CO emission g/km 160
Fuel tank capacity litres 55
#
Please note figures are sourced from overseas data where equipment levels by model variant may vary.
*The Start/Stop system is designed to reduce fuel consumption. It achieves this by conditions where the Start/Stop system is deactivated (e.g. during engine warm-up), please refer to the owner’s manual for full operating information
automatically switching off the engine while the vehicle is stationary and then starting it again automatically when the driver wants to drive off. There are certain operating conditions where the Start/Stop system is deactivated (e.g. during
engine warm-up), please refer to the owner’s manual for full operating information.
**Fuel consumption figures according to ADR 81/02 derived from laboratory testing. Factors including but not limited to driving style, road and traffic conditions, environmental influences, vehicle condition and accessories fitted, will in
practice in the real world lead to figures which generally differ from those advertised. Advertised figures are meant for comparison amongst vehicles only.

25 Specifications
Technical Specifications
Model
132TSI
132TSI Premium
Running Gear 1.8 litre TSI BlueMotion Technology
Suspension
Front Axle Independent, MacPherson struts with lower A-arms. Anti-roll bar
Rear Axle Independent, four-link with coil springs. Anti-roll bar
Steering Electro-mechanical power assisted rack & pinion steering
Brake Systems
Anti-lock Braking System (ABS) with Electronic Brake-pressure Distribution (EBD), Brake Assist and Electronic Stabilisation Program (ESP).
Brake energy recuperation
Brakes
Front Ventilated discs
Rear Discs
Turning Circle (m) 10.9
Weights 6 Speed DSG
Tare Mass Kg 1491
Towing Capacity kg*
Braked
1500
Unbraked
750
Towbar Load Limit kg 80
Exterior Dimensions
Overall length mm 4578
Width mm
1799
Height mm
1496
Wheelbase mm
2629
Track mm
Front^
1543-1546
Rear^
1505-1517
Luggage Area Dimensions
#
Luggage area volume L
Rear seat upright 605
Rear seat folded 1620
Luggage area floor length mm
Rear seat upright 1055
Rear seat folded 1831
Luggage area width mm
At narrowest point 1003
Luggage load height mm
To luggage cover 584
To roof lining 936
*Towing capacities are applicable to Volkswagen Genuine Accessory Tow Bar. Towing capacity figures are maximum figures and actual towing capacity depends on factors including the laden mass of the vehicle, driving conditions and fitment of any accessories. Volkswagen Group
Australia does not endorse or will not be held liable for any claim, loss or damage arising from the use or fitment of electronic trailer brakes. #Figures are sourced from overseas data where equipment levels by model variant may vary. ^Track figures are based on vehicles fitted with
specified standard wheels.

26Colours and Upholstery
Colour Combinations
Interior Trim Exterior Colours
Pure White Tornado Red Tungsten Silver M Indium Grey M Deep Black PE
132TSI
Black 'Summits' cloth seat upholstery S S S S S
132TSI Premium
Black Vienna leather appointed seat upholstery* S S S S S
*Leather appointed seats has a combination of genuine and artificial leather, but are not wholly leather.
Please note Metallic (M) and Pearl Effect (PE) paint are optional at extra cost.
Model
132TSI
132TSI Premium
Running Gear 1.8 litre TSI BlueMotion Technology
Suspension
Front Axle Independent, MacPherson struts with lower A-arms. Anti-roll bar
Rear Axle Independent, four-link with coil springs. Anti-roll bar
Steering Electro-mechanical power assisted rack & pinion steering
Brake Systems
Anti-lock Braking System (ABS) with Electronic Brake-pressure Distribution (EBD), Brake Assist and Electronic Stabilisation Program (ESP).
Brake energy recuperation
Brakes
Front Ventilated discs
Rear Discs
Turning Circle (m) 10.9
Weights 6 Speed DSG
Tare Mass Kg 1491
Towing Capacity kg*
Braked
1500
Unbraked
750
Towbar Load Limit kg 80
Exterior Dimensions
Overall length mm 4578
Width mm
1799
Height mm
1496
Wheelbase mm
2629
Track mm
Front^
1543-1546
Rear^
1505-1517
Luggage Area Dimensions
#
Luggage area volume L
Rear seat upright 605
Rear seat folded 1620
Luggage area floor length mm
Rear seat upright 1055
Rear seat folded 1831
Luggage area width mm
At narrowest point 1003
Luggage load height mm
To luggage cover 584
To roof lining 936
*Towing capacities are applicable to Volkswagen Genuine Accessory Tow Bar. Towing capacity figures are maximum figures and actual towing capacity depends on factors including the laden mass of the vehicle, driving conditions and fitment of any accessories. Volkswagen Group
Australia does not endorse or will not be held liable for any claim, loss or damage arising from the use or fitment of electronic trailer brakes. #Figures are sourced from overseas data where equipment levels by model variant may vary. ^Track figures are based on vehicles fitted with
specified standard wheels.
S Standard
O
Optional Extra
P
Available as part of an optional package

4MOTION
An all-wheel drive system that provides the best possible traction at all road speeds, in all weather and
road conditions. An electronically controlled multi-plate clutch directs torque to the axle with the best
traction.
When operating under a relatively low load or when coasting, power is primarily distributed to the front
axle, thus saving fuel. However, the rear axle can be variably engaged in fractions of a second whenever
necessary, even before any wheel starts to slip and therefore reducing the potential for a loss of traction.
The wheels of the vehicle are prevented from spinning even when driving off and accelerating.
Activation of the multi-plate clutch is based primarily on the engine torque demanded by the driver. In
parallel, a system within the all-wheel drive control unit evaluates such parameters as wheel speeds and
steering angle.
Adaptive Cruise Control (ACC)*
Adaptive Cruise Control (ACC) is an extension of the conventional cruise control system with advanced
capabilities based on a radar sensor. When ACC is activated, the vehicle automatically brakes and
accelerates to a speed and distance set by the driver.
If the Golf Alltrack approaches a slower vehicle, the ACC brakes the car to the same speed and maintains
the pre-selected distance. Even when a vehicle pulls into the same lane in front of you or slows, your
vehicle is automatically decelerated to the pre-selected distance. If the vehicle ahead moves out of your
lane, the Golf Alltrack then accelerates up to the preset desired speed.
Deceleration of the vehicle may take place via intervention in the engine management system. If
deceleration via engine torque is not sufficient, brakeintervention takes place, braking the vehicle to a
standstill if the traffic situation necessitates. ACC can be reactivated automatically by depressing the
accelerator pedal.
The dynamics of the ACC system can by individually varied by selecting one of the driving programs from
the driver profile selector.
Adaptive Cruise Control (ACC) cannot replace the driver’s attentiveness. The driver is still legally responsible for the vehicle and
must monitor the speed and distance in relation to other vehicles. The ACC system should not be used on winding roads or in
adverse weather conditions such as heavy rain.
Anti-lock Braking System (ABS)
When braking, wheel speed sensors measure the road wheel speed and should one ormorewheels start
to lock the ABS system reduces brake pressure to that wheel. Thisprevents the wheels from locking during
heavy or emergency braking, enabling thevehicle to remain steerable.
Anti-Slip Regulation (ASR)
ASR is a traction control system that prevents the wheels from spinning under acceleration by reducing
engine torque.
Auto Hold function
As soon as the vehicle comes to a complete stop, the ABS hydraulic unit storesthe vehicles final braking
pressure. So even when you take your foot off the brake pedal, all four wheels brakes remain applied,
providing increased comfort in stationary traffic. This function is released automatically when you drive
off again.
Brake Assist
During emergency braking, Brake Assist aids the driver by increasing the brake pressure automatically to a
level exceeding the locking limit. The ABS is thus quickly brought into the operating range, which enables
maximum vehicle deceleration to be achieved.
Direct Shift Gearbox (DSG)
DSG is a manual gearbox in which the gearshifts are controlled electronically. What makes the DSG unique
is that it has 2 separate gear sets operated by 2 clutches. The benefit of 2 gear sets and 2 clutches is that
one gear set and clutch is engaged driving the vehicle with the second disengaged clutch having already
pre-selected the next gear awaiting for power to be transferred. As the next gear has already been pre-
selected prior to power being applied, the gear change only takes 3-4 100ths of a second. There is virtually
no interruption to power, traction or acceleration. The DSG also offers Tiptronic gear selection and sports
mode.
Driving Profile Selection
Driving profile selection provides the driver with a wide-ranging choice of settings that can be made to the
vehicle according to the driver’s preferences. The driver has the option of choosing between the following
driving profiles: Normal, Sport, Eco, Off-road and Individual. The Normal profile offers a comfortable but
dynamic driving style. Sport provides faster response of the accelerator pedal and steering while the DSG
switches to Sport mode. Eco mode has been designed to enhance fuel efficiency by including coasting
function and by adapting engine performance, earlier gearshift points and consumption-optimised control
of the air conditioning system. Exclusive to Alltrack, Off-road mode activates a hill descent function
(maintains a constant speed on the descent), a modified accelerator pedal response and an off-road
configuration of the ABS (modified control thresholds form a desirable wedge of gravel in front of the
wheels). The Individual setting allows the driver to separately set various parameters including steering,
engine, Adaptive Cruise Control (ACC) and air conditioning.
Fatigue Detection
The driver Fatigue Detection system automatically analyses the driving characteristics and if they indicate
possible fatigue, recommends that the drivertakes a break. The system continually evaluates steering
wheel movements along with other signals in the vehicle on motorways and others roads at speeds
in excess of 65 km/h, and calculates a fatigue estimate. If fatigue is detected, the driver is warned by
information in the Multi-function Display andan acoustic signal. The warning is repeated after 15 minutes
if thedriver hasnot taken a break.
Fatigue Detection cannot replace the driver’s attentiveness. The driver is still legally responsible for the vehicle and therefore
determining whether or not they are fit to drive. A driving time of 15 minutes is required in order to assess the driver correctly.
The functionality of the system is restricted given a sporty driving style, winding roads and poor road surfaces.
Electronic Brake-pressure Distribution (EBD)
Electronic, more sophisticated means of regulating the ratio of front/rear brake pressure. Settings are
varied according to driving and load conditions to ensure each wheel is braked to the optimum extent.
Electronic Differential Lock (EDL)
EDL improves driving and steering characteristics when accelerating on road surfaces where each wheel
has a different degree of traction. The system operates automatically and is combined with the ABS system.
Using the ABS wheel sensors, EDL monitors the speed of the individual driving wheels. When a difference in
driving wheel speed is detected (i.e. when one wheel starts to spin due to differences in road surfaces, e.g.
due to water or dirt) the system brakes the spinning wheel, transferring engine power to the wheel with the
best traction.
27
Glossary
Glossary
*Optional equipment for specific models.

Electronic Stabilisation Program (ESP)
ABS and ASR traction control systems are integrated into the Electronic Stabilisation Program
(ESP). In short, ESP helps ensure that the vehicle goes where you steer it even inextreme driving
conditions. The ESP system constantly compares the actual movementof the vehicle with pre-
determined values and should a situation arise where the vehicle starts to skid, ESP will apply the
brakes to individual wheels and automatically adjust the engine’s power output to correct the
problem. ESP prevents the vehicle from losing control when trying to avoid an accident, for example.
It also reduces the effects of understeer or oversteer.
Emergency Assist*
Emergency Assist monitors the driving characteristics and recognises, within the limits of the system,
if the driver suddenly becomes incapable of driving (due to the vehicle not being controlled).
Emergency Assist detects a lack of activity on the part of the driver and issues repeated visual and
acoustic warnings and initiates a quick jolt of the brakes to request the driver to take control of the
vehicle.
If the driver remains inactive, the system automatically controls acceleration, braking and steering
to slow the vehicle down and keep it in the lane. If there is sufficient stopping distance, the system
decelerates the vehicle to a complete stop and switches on the electronic parking brake automatically.
When Emergency Assist is actively controlling the vehicle, the hazard warning lights are switched on
and the vehicle performs a slight snaking motion within its lane to warn other road users. Ideally this
will prevent a collision, or at least reduce its severity.
Emergency Assist cannot replace the driver's attentiveness. The driver is still legally responsible for the vehicle and must
monitor the speed and distance in relation to other vehicles. Emergency Assist utilises both the Adaptive Cruise Control
(ACC) and Lane Assist driver assistance systems. The ACC system should not be used on winding roads or in adverse
weather conditions such as heavy rain. The system will not work if there are no recognisable lane markings. The camera
vision can be reduced by rain, snow, heavy spray or oncoming lights. This and vehicles in front of you can lead to the lane
markings not being recognised by the Lane Assist system.
Extended Electronic Differential Lock (XDL)
XDL is an extension of the Electronic Differential Lock (EDL) function. When cornering, XDL responds
to the load relief at the front wheel on the inside of a corner. The ESP hydraulics are used for the
XDL to apply pressure to the wheel on the inside of the corner in order to prevent wheel spin. This
improves traction and reduces the tendency to understeer.
As a direct result of the one-sided and precise braking pressure, cornering is sportier andmore
accurate.
Front Assist with City Emergency Brake (City EB) and Pedestrian
Monitoring functions
The Front Assist ambient traffic monitoring system uses a radar sensor to detect critical distance
situations and thus help to shorten the braking distance, reducing the risk of a rear-end collision.
The traffic ahead is monitored constantly by the radar at the front. If a vehicle is detected ahead of
you in the lane, the distance and the speed relative to it are calculated. If the gap is closing too fast,
Front Assist initially warns the driver by means of an audible as well as a visual signal. At the same
time, the brake pads are brought into contact with the brake discs and the sensitivity of the Brake
Assist is increased. This primes the braking system for a possible emergency stop. Furthermore,
an automatic jolt of the brakes warns the driver of the danger. If the driver also fails to react to the
warning jolt, Front Assist brakes automatically, helping to avoid a collision or reduce the severity of
the accident.
The City Emergency Brake (City EB) function is a radar based emergency braking system designed
to help a driver avoid a low-speed crash or to reduce its severity. At vehicle speeds below 30km/h,
City EB monitors the area ahead of the car for vehicles which might present a threat of collision. If
a collision is likely, City Emergency Braking first pre-charges the brakes and makes the emergency
Brake Assist system more sensitive: if the driver should notice the risk, the car is ready to respond
more quickly to their braking action. However, if the driver still takes no action and a collision becomes
imminent, City Emergency Braking independently applies the brakes very hard. If the driver intervenes
to try to avoid the accident, either by accelerating hard or by steering, City EB will deactivate and
allow the driver to complete the avoidance manoeuvre.
Pedestrian Monitoring is an extension of the Front Assist monitoring system featuring the City
Emergency Brake. The system uses a radar sensor in the radiator grille to monitor the area in front of
the vehicle and within the limits of the system, register certain situations, for example a pedestrian
stepping onto the road suddenly. The system then gives an immediate acoustic and visual signal to
warn the driver. If the driver does not brake, the system initiates a jolt of the brake as a warning about
the critical situation, while at the same time preparing for hard braking. If the driver fails to react, the
system automatically performs emergency braking, within system limits. Ideally this will prevent a
collision, or at least reduce its severity.
Front Assist with City Emergency Brake (City EB) and Pedestrian Monitoring cannot replace the driver's attentiveness. The
driver is still legally responsible for the vehicle and must monitor the speed and distance in relation to other vehicles.
Lane Assist*
Lane Assist is a lane departure warning system that is designed to help reduce the likelihood of the
vehicle leaving the road or crossing into on oncoming lane and therefore the risk of accident as a result
of driver distraction or a lapse in concentration.
The Lane Assist system monitors the road ahead with the aid of a camera (located near the interior
rear-view mirror) which recognises lane markings and evaluates the position of the vehicle. If the
vehicle starts to leave the lane, the Lane Assist system takes corrective steering action. If this is not
sufficient the driver is warned about the situation by a steering vibration and is asked to take over the
steering. Additionally, if no active steering movements by the driver are recognised for longer than
approximately 8 seconds, a message will appear in the Multi-Function Display in conjunction with a
warning tone. The corrective steering function can be overridden by the driver at any time and the
system does not react if the turn indicator is set before crossing a lane marking.
When adaptive lane guidance* is active and the system detects both lane markings to the left and
right of the vehicle, the function provides permanent assistance while the vehicle is in motion. The
system adopts the preferred position within the lane in which the vehicle is travelling. For example,
if the vehicle is being driven slightly off-centre in the lane, the system will learn to adopt the new
position within a short period of time.
Lane Assist cannot replace the driver's attentiveness. The driver is still legally responsible for the vehicle and therefore
staying in the lane at all times. The system will not work if there are no recognisable lane markings. The camera vision can
be reduced by rain, snow, heavy spray or oncoming lights. This and vehicles in front of you can lead to the lane markings
not being recognised by the Lane Assist system. The Lane Assist system does not activate at a vehicle speed of less than
65km/h.
28Glossary
Glossary
*Optional equipment for specific models. ^Only available on selected models

Light Assist^
Light Assist provides enhanced comfort and safety on the road by means of automatic high beam
control. A camera on the interior mirror observes the traffic above 60 km/h and in complete darkness,
Light Assist automatically switches on the high beam headlights. The system detects vehicles
travailing ahead, as well as oncoming traffic and automatically dips the headlights before they are
dazzled. Automatic alternation between high beam and low beam headlights ensures optimum
illumination of the road ahead.
Manoeuvre braking
Manoeuvre braking assists the driver to avoid or reduce damage in a potential collision by initiating
emergency braking. It supports the driver during forward and reverse manoeuvring in a speed range
of a maximum 10 km/h. If the risk for an accident is recognised, emergency braking is initiated to
minimise possible damage.
Manoeuvre braking cannot replace the driver’s attentiveness. The driver is still legally responsible for the vehicle. The object
must be detected by the sensors. If the driver notices a risk that pedestrians, other vehicles or objects could be damaged they
need to react accordingly and stop the vehicle.
Multi-Collision Brake
The multi-collision brake has been designed to provide effective assistance for the driver in the
moments after an accident. Multi-collision brake triggers automatic controlled braking once an initial
collision has been detected so as to reduce the intensity of further accidents after a collision and can
help prevent follow-on collisions with oncoming traffic.
The triggering of the multi-collision brake is based on a collision being detected by the airbag sensors.
The ESP control unit limits the deceleration of the vehicle by the multi-collision brake to a defined
value and vehicle speed. The vehicle can still be controlled by the driver, even when automatic braking
is taking place. The driver can interrupt the multi-collision braking at any time by accelerating or
braking even more strongly.
Park Assist*
The third generation Park Assist system actively helps the driver when entering or reversing into 90º
parking bays, as well as reversing into and driving out of parallel parking spaces. The system works
by using sensors mounted either side of the front and rear bumpers together with parking distance
sensors front and rear. To park, the driver simply presses the Park Assist button to select the type of
parking manoeuvre and uses the appropriate indicator as the car slowly passes the potential parking
space. Sensors scan the size of the parking space as the car is driven past and the driver is alerted
if the parking space is big enough. If there is sufficient space, the driver stops the car, selects the
correct gear and lets go of the steering wheel.
Park Assist will alert the driver of the intended path and subsequently the appearance of obstacles in
the Multi-Function Display, within the driver’s field of vision. Park Assist then actively supports the
driver by taking over the steering control and parks the vehicle in the available space using the ideal
course, if necessary with several moves. The driver can however take over the control of the steering
at any time and end the automatic parking procedure.
Park Assist cannot replace the driver’s attentiveness. The driver is still legally responsible for the vehicle. If the driver
notices a risk that pedestrians, other vehicles or objects could be damaged or if they are uncertain of the risk, they will need
to react accordingly and stop the vehicle, ending the function.
Proactive occupant protection system*
The proactive occupant protection system incorporates active and passive safety elements. When
the system detects a potential accident situation, the occupants and the vehicle areprepared for a
possible accident. Automatic tensioning of the seat belts secures the driver and front passenger in
their seats to attain the best possible protective potential ofthe airbag and belt system. In case of
high transverse dynamics the side windows
(and optional panoramic sunroof) are also closed, leaving just a small air gap. Closing of the windows
offers optimal support to the head and side airbags which results in the bestpossible protection.
Traffic Jam Assist*
In congested traffic situations, Traffic Jam Assist makes driving significantly more comfortable and
helps to avoid typical rear-end collision accidents. The Traffic Jam Assist function combines the driver
assistance systems Adaptive Cruise Control (ACC) and Lane Assist with adaptive lane guidance.
In a speed range of 0-60km/h, the system automatically controls acceleration, braking, steering and if
required, will decelerate to a stop behind a vehicle that is stopping.
Traffic Jam Assist cannot replace the driver's attentiveness. The driver is still legally responsible for the vehicle and
must monitor the speed and distance in relation to other vehicles. Traffic Jam Assist has been developed for use only on
motorways. The ACC system should not be used on winding roads or in adverse weather conditions such as heavy rain. The
system will not work if there are no recognisable lane markings. The camera vision can be reduced by rain, snow, heavy spray
or oncoming lights. This and vehicles in front of you can lead to the lane markings not being recognised by the Lane Assist
system.
29 Glossary
Glossary
*Optional equipment for specific models. ^Only available on selected models

132TSI Premium with optional Sport Luxury Package shown
Volkswagen Group Australia Pty Ltd
24 Muir Road Chullora NSW 2190
ABN 14 093 117 876
Produced in Australia
April 2020
Publication: VWPGOLALLSPECMY205
Golf Alltrack
Your Volkswagen Dealer.
Important Information
Apple CarPlay® is a registered trade mark of Apple Inc. Android Auto™ is a registered
trademark of Google Inc. MirrorLink® is a registered trade mark of Car Connectivity
Consortium LLC. Bluetooth® is a registered trade mark of Bluetooth SIG Inc.
Volkswagen is distributed by Volkswagen Group Australia Pty Ltd (ABN 14 093 117 876) of
24 Muir Road Chullora, NSW 2190. Specifications are as planned at April 2020, for Model
Year 20.5 and are subject to change without notice or obligation. All information in this
brochure are correct at the time of publication, however variations may occur from time
to time and Volkswagen, in so far as it is permitted by law to do so, shall not be liable in
any way as a result of any reliance by any person on anything contained in this brochure.
Authorised Volkswagen Dealers will provide up-to-date information on model application,
design feature, prices, and availability on request.
